AR
-
 KAIST Research team develops anti-icing film that only requires sunlight
A KAIST research team has developed an anti-icing and de-icing film coating technology that can apply the photothermal effect of gold nanoparticles to industrial sites without the need for heating wires, periodic spray or oil coating of anti-freeze substances, and substrate design alterations.
The group led by Professor Hyoungsoo Kim from the Department of Mechanical Engineering (Fluid & Interface Laboratory) and Professor Dong Ki Yoon from the Department of Chemistry (Soft Material Assembly Group) revealed on January 3 to have together developed an original technique that can uniformly pattern gold nanorod (GNR) particles in quadrants through simple evaporation, and have used this to develop an anti-icing and de-icing surface.
Many scientists in recent years have tried to control substrate surfaces through various coating techniques, and those involving the patterning of functional nanomaterials have gained special attention. In particular, GNR is considered a promising candidate nanomaterial for its biocompatibility, chemical stability, relatively simple synthesis, and its stable and unique property of surface plasmon resonance. To maximize the performance of GNR, it is important to achieve a high uniformity during film deposition, and a high level of rod alignment. However, achieving both criteria has thus far been a difficult challenge.
< Figure 1. Conceptual image to display Hydrodynamic mechanisms for the formation of a homogeneous quadrant cellulose nanocrystal(CNC) matrix. >
To solve this, the joint research team utilized cellulose nanocrystal (CNC), a next-generation functional nanomaterial that can easily be extracted from nature. By co-assembling GNR on CNC quadrant templates, the team could uniformly dry the film and successfully obtain a GNR film with a uniform alignment in a ring-shape. Compared to existing coffee-ring films, the highly uniform and aligned GNR film developed through this research showed enhanced plasmonic photothermal properties, and the team showed that it could carry out anti-icing and de-icing functions by simply irradiating light in the visible wavelength range.
< Figure 2. Optical and thermal performance evaluation results of gold nanorod film and demonstration of plasmonic heater for anti-icing and de-icing. >
Professor Hyoungsoo Kim said, “This technique can be applied to plastic, as well as flexible surfaces. By using it on exterior materials and films, it can generate its own heat energy, which would greatly save energy through voluntary thermal energy harvesting across various applications including cars, aircrafts, and windows in residential or commercial spaces, where frosting becomes a serious issue in the winter.” Professor Dong Ki Yoon added, “This research is significant in that we can now freely pattern the CNC-GNR composite, which was previously difficult to create into films, over a large area. We can utilize this as an anti-icing material, and if we were to take advantage of the plasmonic properties of gold, we can also use it like stained-glass to decorate glass surfaces.”
This research was conducted by Ph.D. candidate Jeongsu Pyeon from the Department of Mechanical Engineering, and his co-first author Dr. Soon Mo Park (a KAIST graduate, currently a post-doctoral associate at Cornell University), and was pushed in the online volume of Nature Communication on December 8, 2023 under the title “Plasmonic Metasurfaces of Cellulose Nanocrystal Matrices with Quadrants of Aligned Gold Nanorods for Photothermal Anti-Icing." Recognized for its achievement, the research was also selected as an editor’s highlight for the journals Materials Science and Chemistry, and Inorganic and Physical Chemistry.
This research was supported by the Individual Basic Mid-Sized Research Fund from the National Research Foundation of Korea and the Center for Multiscale Chiral Architectures.
2024.01.16 View 10847
KAIST Research team develops anti-icing film that only requires sunlight
A KAIST research team has developed an anti-icing and de-icing film coating technology that can apply the photothermal effect of gold nanoparticles to industrial sites without the need for heating wires, periodic spray or oil coating of anti-freeze substances, and substrate design alterations.
The group led by Professor Hyoungsoo Kim from the Department of Mechanical Engineering (Fluid & Interface Laboratory) and Professor Dong Ki Yoon from the Department of Chemistry (Soft Material Assembly Group) revealed on January 3 to have together developed an original technique that can uniformly pattern gold nanorod (GNR) particles in quadrants through simple evaporation, and have used this to develop an anti-icing and de-icing surface.
Many scientists in recent years have tried to control substrate surfaces through various coating techniques, and those involving the patterning of functional nanomaterials have gained special attention. In particular, GNR is considered a promising candidate nanomaterial for its biocompatibility, chemical stability, relatively simple synthesis, and its stable and unique property of surface plasmon resonance. To maximize the performance of GNR, it is important to achieve a high uniformity during film deposition, and a high level of rod alignment. However, achieving both criteria has thus far been a difficult challenge.
< Figure 1. Conceptual image to display Hydrodynamic mechanisms for the formation of a homogeneous quadrant cellulose nanocrystal(CNC) matrix. >
To solve this, the joint research team utilized cellulose nanocrystal (CNC), a next-generation functional nanomaterial that can easily be extracted from nature. By co-assembling GNR on CNC quadrant templates, the team could uniformly dry the film and successfully obtain a GNR film with a uniform alignment in a ring-shape. Compared to existing coffee-ring films, the highly uniform and aligned GNR film developed through this research showed enhanced plasmonic photothermal properties, and the team showed that it could carry out anti-icing and de-icing functions by simply irradiating light in the visible wavelength range.
< Figure 2. Optical and thermal performance evaluation results of gold nanorod film and demonstration of plasmonic heater for anti-icing and de-icing. >
Professor Hyoungsoo Kim said, “This technique can be applied to plastic, as well as flexible surfaces. By using it on exterior materials and films, it can generate its own heat energy, which would greatly save energy through voluntary thermal energy harvesting across various applications including cars, aircrafts, and windows in residential or commercial spaces, where frosting becomes a serious issue in the winter.” Professor Dong Ki Yoon added, “This research is significant in that we can now freely pattern the CNC-GNR composite, which was previously difficult to create into films, over a large area. We can utilize this as an anti-icing material, and if we were to take advantage of the plasmonic properties of gold, we can also use it like stained-glass to decorate glass surfaces.”
This research was conducted by Ph.D. candidate Jeongsu Pyeon from the Department of Mechanical Engineering, and his co-first author Dr. Soon Mo Park (a KAIST graduate, currently a post-doctoral associate at Cornell University), and was pushed in the online volume of Nature Communication on December 8, 2023 under the title “Plasmonic Metasurfaces of Cellulose Nanocrystal Matrices with Quadrants of Aligned Gold Nanorods for Photothermal Anti-Icing." Recognized for its achievement, the research was also selected as an editor’s highlight for the journals Materials Science and Chemistry, and Inorganic and Physical Chemistry.
This research was supported by the Individual Basic Mid-Sized Research Fund from the National Research Foundation of Korea and the Center for Multiscale Chiral Architectures.
2024.01.16 View 10847 -
 KAIST develops an artificial muscle device that produces force 34 times its weight
- Professor IlKwon Oh’s research team in KAIST’s Department of Mechanical Engineering developed a soft fluidic switch using an ionic polymer artificial muscle that runs with ultra-low power to lift objects 34 times greater than its weight.
- Its light weight and small size make it applicable to various industrial fields such as soft electronics, smart textiles, and biomedical devices by controlling fluid flow with high precision, even in narrow spaces.
Soft robots, medical devices, and wearable devices have permeated our daily lives. KAIST researchers have developed a fluid switch using ionic polymer artificial muscles that operates at ultra-low power and produces a force 34 times greater than its weight. Fluid switches control fluid flow, causing the fluid to flow in a specific direction to invoke various movements.
KAIST (President Kwang-Hyung Lee) announced on the 4th of January that a research team under Professor IlKwon Oh from the Department of Mechanical Engineering has developed a soft fluidic switch that operates at ultra-low voltage and can be used in narrow spaces.
Artificial muscles imitate human muscles and provide flexible and natural movements compared to traditional motors, making them one of the basic elements used in soft robots, medical devices, and wearable devices. These artificial muscles create movements in response to external stimuli such as electricity, air pressure, and temperature changes, and in order to utilize artificial muscles, it is important to control these movements precisely.
Switches based on existing motors were difficult to use within limited spaces due to their rigidity and large size. In order to address these issues, the research team developed an electro-ionic soft actuator that can control fluid flow while producing large amounts of force, even in a narrow pipe, and used it as a soft fluidic switch.
< Figure 1. The separation of fluid droplets using a soft fluid switch at ultra-low voltage. >
The ionic polymer artificial muscle developed by the research team is composed of metal electrodes and ionic polymers, and it generates force and movement in response to electricity. A polysulfonated covalent organic framework (pS-COF) made by combining organic molecules on the surface of the artificial muscle electrode was used to generate an impressive amount of force relative to its weight with ultra-low power (~0.01V).
As a result, the artificial muscle, which was manufactured to be as thin as a hair with a thickness of 180 µm, produced a force more than 34 times greater than its light weight of 10 mg to initiate smooth movement. Through this, the research team was able to precisely control the direction of fluid flow with low power.
< Figure 2. The synthesis and use of pS-COF as a common electrode-electrolyte host for electroactive soft fluid switches. A) The synthesis schematic of pS-COF. B) The schematic diagram of the operating principle of the electrochemical soft switch. C) The schematic diagram of using a pS-COF-based electrochemical soft switch to control fluid flow in dynamic operation. >
Professor IlKwon Oh, who led this research, said, “The electrochemical soft fluidic switch that operate at ultra-low power can open up many possibilities in the fields of soft robots, soft electronics, and microfluidics based on fluid control.” He added, “From smart fibers to biomedical devices, this technology has the potential to be immediately put to use in a variety of industrial settings as it can be easily applied to ultra-small electronic systems in our daily lives.”
The results of this study, in which Dr. Manmatha Mahato, a research professor in the Department of Mechanical Engineering at KAIST, participated as the first author, were published in the international academic journal Science Advances on December 13, 2023. (Paper title: Polysulfonated Covalent Organic Framework as Active Electrode Host for Mobile Cation Guests in Electrochemical Soft Actuator)
This research was conducted with support from the National Research Foundation of Korea's Leader Scientist Support Project (Creative Research Group) and Future Convergence Pioneer Project.
* Paper DOI: https://www.science.org/doi/abs/10.1126/sciadv.adk9752
2024.01.11 View 10792
KAIST develops an artificial muscle device that produces force 34 times its weight
- Professor IlKwon Oh’s research team in KAIST’s Department of Mechanical Engineering developed a soft fluidic switch using an ionic polymer artificial muscle that runs with ultra-low power to lift objects 34 times greater than its weight.
- Its light weight and small size make it applicable to various industrial fields such as soft electronics, smart textiles, and biomedical devices by controlling fluid flow with high precision, even in narrow spaces.
Soft robots, medical devices, and wearable devices have permeated our daily lives. KAIST researchers have developed a fluid switch using ionic polymer artificial muscles that operates at ultra-low power and produces a force 34 times greater than its weight. Fluid switches control fluid flow, causing the fluid to flow in a specific direction to invoke various movements.
KAIST (President Kwang-Hyung Lee) announced on the 4th of January that a research team under Professor IlKwon Oh from the Department of Mechanical Engineering has developed a soft fluidic switch that operates at ultra-low voltage and can be used in narrow spaces.
Artificial muscles imitate human muscles and provide flexible and natural movements compared to traditional motors, making them one of the basic elements used in soft robots, medical devices, and wearable devices. These artificial muscles create movements in response to external stimuli such as electricity, air pressure, and temperature changes, and in order to utilize artificial muscles, it is important to control these movements precisely.
Switches based on existing motors were difficult to use within limited spaces due to their rigidity and large size. In order to address these issues, the research team developed an electro-ionic soft actuator that can control fluid flow while producing large amounts of force, even in a narrow pipe, and used it as a soft fluidic switch.
< Figure 1. The separation of fluid droplets using a soft fluid switch at ultra-low voltage. >
The ionic polymer artificial muscle developed by the research team is composed of metal electrodes and ionic polymers, and it generates force and movement in response to electricity. A polysulfonated covalent organic framework (pS-COF) made by combining organic molecules on the surface of the artificial muscle electrode was used to generate an impressive amount of force relative to its weight with ultra-low power (~0.01V).
As a result, the artificial muscle, which was manufactured to be as thin as a hair with a thickness of 180 µm, produced a force more than 34 times greater than its light weight of 10 mg to initiate smooth movement. Through this, the research team was able to precisely control the direction of fluid flow with low power.
< Figure 2. The synthesis and use of pS-COF as a common electrode-electrolyte host for electroactive soft fluid switches. A) The synthesis schematic of pS-COF. B) The schematic diagram of the operating principle of the electrochemical soft switch. C) The schematic diagram of using a pS-COF-based electrochemical soft switch to control fluid flow in dynamic operation. >
Professor IlKwon Oh, who led this research, said, “The electrochemical soft fluidic switch that operate at ultra-low power can open up many possibilities in the fields of soft robots, soft electronics, and microfluidics based on fluid control.” He added, “From smart fibers to biomedical devices, this technology has the potential to be immediately put to use in a variety of industrial settings as it can be easily applied to ultra-small electronic systems in our daily lives.”
The results of this study, in which Dr. Manmatha Mahato, a research professor in the Department of Mechanical Engineering at KAIST, participated as the first author, were published in the international academic journal Science Advances on December 13, 2023. (Paper title: Polysulfonated Covalent Organic Framework as Active Electrode Host for Mobile Cation Guests in Electrochemical Soft Actuator)
This research was conducted with support from the National Research Foundation of Korea's Leader Scientist Support Project (Creative Research Group) and Future Convergence Pioneer Project.
* Paper DOI: https://www.science.org/doi/abs/10.1126/sciadv.adk9752
2024.01.11 View 10792 -
 KAIST Demonstrates AI and sustainable technologies at CES 2024
On January 2, KAIST announced it will be participating in the Consumer Electronics Show (CES) 2024, held between January 9 and 12.
CES 2024 is one of the world’s largest tech conferences to take place in Las Vegas. Under the slogan “KAIST, the Global Value Creator” for its exhibition, KAIST has submitted technologies falling under one of following themes: “Expansion of Human Intelligence, Mobility, and Reality”, and “Pursuit of Human Security and Sustainable Development”.
24 startups and pre-startups whose technologies stand out in various fields including artificial intelligence (AI), mobility, virtual reality, healthcare and human security, and sustainable development, will welcome their visitors at an exclusive booth of 232 m2 prepared for KAIST at Eureka Park in Las Vegas.
12 businesses will participate in the first category, “Expansion of Human Intelligence, Mobility, and Reality”, including MicroPix, Panmnesia, DeepAuto, MGL, Reports, Narnia Labs, EL FACTORY, Korea Position Technology, AudAi, Planby Technologies, Movin, and Studio Lab.
In the “Pursuit of Human Security and Sustainable Development” category, 12 businesses including Aldaver, ADNC, Solve, Iris, Blue Device, Barreleye, TR, A2US, Greeners, Iron Boys, Shard Partners and Kingbot, will be introduced.
In particular, Aldaver is a startup that received the Korean Business Award 2023 as well as the presidential award at the Challenge K-Startup with its biomimetic material and printing technology. It has attracted 4.5 billion KRW of investment thus far.
Narnia Labs, with its AI design solution for manufacturing, won the grand prize for K-tech Startups 2022, and has so far attracted 3.5 billion KRW of investments.
Panmnesia is a startup that won the 2024 CES Innovation Award, recognized for their fab-less AI semiconductor technology. They attracted 16 billion KRW of investment through seed round alone.
Meanwhile, student startups will also be presented during the exhibition. Studio Lab received a CES 2024 Best of Innovation Award in the AI category. The team developed the software Seller Canvas, which automatically generates a page for product details when a user uploads an image of a product.
The central stage at the KAIST exhibition booth will be used to interview members of the participating startups between Jan 9 to 11, as well as a networking site for businesses and invited investors during KAIST NIGHT on the evening of 10th, between 5 and 7 PM.
Director Sung-Yool Choi of the KAIST Institute of Technology Value Creation said, “Through CES 2024, KAIST will overcome the limits of human intelligence, mobility, and space with the deep-tech based technologies developed by its startups, and will demonstrate its achievements for realizing its vision as a global value-creating university through the solutions for human security and sustainable development.”
2024.01.05 View 10938
KAIST Demonstrates AI and sustainable technologies at CES 2024
On January 2, KAIST announced it will be participating in the Consumer Electronics Show (CES) 2024, held between January 9 and 12.
CES 2024 is one of the world’s largest tech conferences to take place in Las Vegas. Under the slogan “KAIST, the Global Value Creator” for its exhibition, KAIST has submitted technologies falling under one of following themes: “Expansion of Human Intelligence, Mobility, and Reality”, and “Pursuit of Human Security and Sustainable Development”.
24 startups and pre-startups whose technologies stand out in various fields including artificial intelligence (AI), mobility, virtual reality, healthcare and human security, and sustainable development, will welcome their visitors at an exclusive booth of 232 m2 prepared for KAIST at Eureka Park in Las Vegas.
12 businesses will participate in the first category, “Expansion of Human Intelligence, Mobility, and Reality”, including MicroPix, Panmnesia, DeepAuto, MGL, Reports, Narnia Labs, EL FACTORY, Korea Position Technology, AudAi, Planby Technologies, Movin, and Studio Lab.
In the “Pursuit of Human Security and Sustainable Development” category, 12 businesses including Aldaver, ADNC, Solve, Iris, Blue Device, Barreleye, TR, A2US, Greeners, Iron Boys, Shard Partners and Kingbot, will be introduced.
In particular, Aldaver is a startup that received the Korean Business Award 2023 as well as the presidential award at the Challenge K-Startup with its biomimetic material and printing technology. It has attracted 4.5 billion KRW of investment thus far.
Narnia Labs, with its AI design solution for manufacturing, won the grand prize for K-tech Startups 2022, and has so far attracted 3.5 billion KRW of investments.
Panmnesia is a startup that won the 2024 CES Innovation Award, recognized for their fab-less AI semiconductor technology. They attracted 16 billion KRW of investment through seed round alone.
Meanwhile, student startups will also be presented during the exhibition. Studio Lab received a CES 2024 Best of Innovation Award in the AI category. The team developed the software Seller Canvas, which automatically generates a page for product details when a user uploads an image of a product.
The central stage at the KAIST exhibition booth will be used to interview members of the participating startups between Jan 9 to 11, as well as a networking site for businesses and invited investors during KAIST NIGHT on the evening of 10th, between 5 and 7 PM.
Director Sung-Yool Choi of the KAIST Institute of Technology Value Creation said, “Through CES 2024, KAIST will overcome the limits of human intelligence, mobility, and space with the deep-tech based technologies developed by its startups, and will demonstrate its achievements for realizing its vision as a global value-creating university through the solutions for human security and sustainable development.”
2024.01.05 View 10938 -
 A KAIST Research Team Develops High-Performance Stretchable Solar Cells
With the market for wearable electric devices growing rapidly, stretchable solar cells that can function under strain have received considerable attention as an energy source. To build such solar cells, it is necessary that their photoactive layer, which converts light into electricity, shows high electrical performance while possessing mechanical elasticity. However, satisfying both of these two requirements is challenging, making stretchable solar cells difficult to develop.
On December 26, a KAIST research team from the Department of Chemical and Biomolecular Engineering (CBE) led by Professor Bumjoon Kim announced the development of a new conductive polymer material that achieved both high electrical performance and elasticity while introducing the world’s highest-performing stretchable organic solar cell.
Organic solar cells are devices whose photoactive layer, which is responsible for the conversion of light into electricity, is composed of organic materials. Compared to existing non-organic material-based solar cells, they are lighter and flexible, making them highly applicable for wearable electrical devices. Solar cells as an energy source are particularly important for building electrical devices, but high-efficiency solar cells often lack flexibility, and their application in wearable devices have therefore been limited to this point.
The team led by Professor Kim conjugated a highly stretchable polymer to an electrically conductive polymer with excellent electrical properties through chemical bonding, and developed a new conductive polymer with both electrical conductivity and mechanical stretchability. This polymer meets the highest reported level of photovoltaic conversion efficiency (19%) using organic solar cells, while also showing 10 times the stretchability of existing devices. The team thereby built the world’s highest performing stretchable solar cell that can be stretched up to 40% during operation, and demonstrated its applicability for wearable devices.
< Figure 1. Chemical structure of the newly developed conductive polymer and performance of stretchable organic solar cells using the material. >
Professor Kim said, “Through this research, we not only developed the world’s best performing stretchable organic solar cell, but it is also significant that we developed a new polymer that can be applicable as a base material for various electronic devices that needs to be malleable and/or elastic.”
< Figure 2. Photovoltaic efficiency and mechanical stretchability of newly developed polymers compared to existing polymers. >
This research, conducted by KAIST researchers Jin-Woo Lee and Heung-Goo Lee as first co-authors in cooperation with teams led by Professor Taek-Soo Kim from the Department of Mechanical Engineering and Professor Sheng Li from the Department of CBE, was published in Joule on December 1 (Paper Title: Rigid and Soft Block-Copolymerized Conjugated Polymers Enable High-Performance Intrinsically-Stretchable Organic Solar Cells).
This research was supported by the National Research Foundation of Korea.
2024.01.04 View 9119
A KAIST Research Team Develops High-Performance Stretchable Solar Cells
With the market for wearable electric devices growing rapidly, stretchable solar cells that can function under strain have received considerable attention as an energy source. To build such solar cells, it is necessary that their photoactive layer, which converts light into electricity, shows high electrical performance while possessing mechanical elasticity. However, satisfying both of these two requirements is challenging, making stretchable solar cells difficult to develop.
On December 26, a KAIST research team from the Department of Chemical and Biomolecular Engineering (CBE) led by Professor Bumjoon Kim announced the development of a new conductive polymer material that achieved both high electrical performance and elasticity while introducing the world’s highest-performing stretchable organic solar cell.
Organic solar cells are devices whose photoactive layer, which is responsible for the conversion of light into electricity, is composed of organic materials. Compared to existing non-organic material-based solar cells, they are lighter and flexible, making them highly applicable for wearable electrical devices. Solar cells as an energy source are particularly important for building electrical devices, but high-efficiency solar cells often lack flexibility, and their application in wearable devices have therefore been limited to this point.
The team led by Professor Kim conjugated a highly stretchable polymer to an electrically conductive polymer with excellent electrical properties through chemical bonding, and developed a new conductive polymer with both electrical conductivity and mechanical stretchability. This polymer meets the highest reported level of photovoltaic conversion efficiency (19%) using organic solar cells, while also showing 10 times the stretchability of existing devices. The team thereby built the world’s highest performing stretchable solar cell that can be stretched up to 40% during operation, and demonstrated its applicability for wearable devices.
< Figure 1. Chemical structure of the newly developed conductive polymer and performance of stretchable organic solar cells using the material. >
Professor Kim said, “Through this research, we not only developed the world’s best performing stretchable organic solar cell, but it is also significant that we developed a new polymer that can be applicable as a base material for various electronic devices that needs to be malleable and/or elastic.”
< Figure 2. Photovoltaic efficiency and mechanical stretchability of newly developed polymers compared to existing polymers. >
This research, conducted by KAIST researchers Jin-Woo Lee and Heung-Goo Lee as first co-authors in cooperation with teams led by Professor Taek-Soo Kim from the Department of Mechanical Engineering and Professor Sheng Li from the Department of CBE, was published in Joule on December 1 (Paper Title: Rigid and Soft Block-Copolymerized Conjugated Polymers Enable High-Performance Intrinsically-Stretchable Organic Solar Cells).
This research was supported by the National Research Foundation of Korea.
2024.01.04 View 9119 -
 The Relentless Rain: East Asia's Recent Floods and What Lies Beneath
In just a month's time, East Asia witnessed torrential downpours that would usually span an entire season. Japan, battered by three times its usual monthly rainfall, faced landslides and flooding that claimed over 200 lives. Meanwhile, South Korea grappled with its longest monsoon in seven years, leaving more than 40 individuals dead or missing. But these events, as harrowing as they sound, are more than just weather anomalies. They're telltale signs, symptoms of a larger malaise that has gripped our planet.
Diving deep into these rain-soaked mysteries, a recently published paper in the journal Science Advances offers a fresh perspective. Led by a research team at the Korea Advanced Institute of Science and Technology (KAIST), Korea, the research unpacks the influence of human-induced climate changes on the East Asia Summer Monsoon frontal system.
Heavy summer rain has a significant impact on agriculture and industry, and can be said to be one of the greatest threats to human society by causing disasters such as floods and landslides, affecting the local ecosystem. It has been reported from all over the world that the intensity of summer heavy rain has changed over the past few decades. However, summer rain in East Asia is caused by various forms such as typhoons, extratropical cyclones, and fronts, and efforts to study heavy frontal rain, which account for more than 40% of summer rainfall, is still insufficient. In addition, because heavy rain is also influenced by natural fluctuations or coincidences in the climate system, it is not yet known to what extent warming due to human activities affects the intensity of heavy frontal precipitation.
An international joint research team consisting of eight institutions from Korea, the United States, and Japan, including KAIST, Tokyo University, Tokyo Institute of Technology, Chonnam National University, GIST, and Utah State University, confirmed the intensity of heavy rain caused by the weather fronts in East Asia using observation data for the past 60 years and found that the coast of southeastern China. It was found that the intensity of heavy rain increased by about 17% across the Korean Peninsula and Japan. To investigate the cause of these changes, the research team used the Earth Metaverse experiment, which simulated Earth with and without greenhouse gas emissions due to human activities, and found that heavy rain intensity was strengthened by about 6% due to greenhouse gas emissions, and the changes discovered were has succeeded for the first time in the world in showing that warming cannot be explained without the effects of human activities.
< Figure 1. (Left) Observed difference in frontal rainfall intensity (FRI) from the later (1991–2015) to the earlier periods (1958–1982) (Right) Visualization of the impact of anthropogenic warming on the intensity of heavy frontal rain analyzed using the Earth Metaverse experiment. >
"It's not just about connecting the dots," said Moon, the first author of the paper, "it's about seeing the larger pattern. Our data analysis reveals a clear and intensified trend in East Asia's frontal rainfall, one that's intertwined with human actions and increasingly harmful for lives and property."
One of the intriguing finds from the study is the mechanics behind this intensification. The team found increased moisture transport due to a warmer climate, which, when coupled with the strengthening of a gigantic weather system called the West North Pacific Subtropical High, results in enhanced frontal rainfall. It’s akin to the climate dialing up the volume on rain events. As the atmosphere warms, it holds more moisture, leading to heavier downpours when conditions are right.
Nobuyuki Utsumi, another voice from the team, makes the science accessible for all, saying, "Monsoon rain isn't just rain anymore. The frequency, the intensity, it's changing. And our actions, our carbon footprint, are casting a larger shadow than we anticipated."
While the devastating news of floods fills headlines, Professor Simon Wang of Utah State University, reminds us of the underlying importance of their study. "It's like reading a detective novel. To solve the mystery of these floods, one has to trace them back to their roots. This work hints at a future where such intense rain events aren't the exception but might become an everyday reality."
Hyungjun Kim, the principal investigator of the team throws in a note of caution, "Understanding this is just the first step. Predicting and preparing for these extremes is the real challenge. Every amplified rainfall event is a message from the future, urging us to adapt." So far, predicting rainfall intensity and locations remains a challenging task for even the most sophisticated weather models.
< Figure 2. Comparison of rates of change in Anthropocene fingerprints. The horizontal axis shows the long-term change slope of the Anthropocene fingerprint signal (1958 to 2015). Shows the probability distribution of slopes extracted from the non-warming experiment (blue) and the warming experiment (red). The vertical solid lines are the slope of the Anthropocene fingerprint signal extracted from observational data. >
The researchers say, “Facing climate change, the narrative of this new study is more than mere numbers and data. It's a story of our planet, our actions, and the rain-soaked repercussions we're beginning to face. As we mop up the aftermath of another flood, research like Moon's beckons us to look deeper, understand better, and act wiser.”
< Figure 3. Comparison of water vapor convergence and rate of change of the western North Pacific high pressure. Shows the gradient of change in water vapor convergence (horizontal axis) and the Northwestern Pacific-East Asia pressure gradient (vertical axis) extracted from warming (red) and non-warming (blue) experiments. Shows the distribution of slope changes of the two indices during the period 1958 to 1982 (P1) and 1991 to 2015 (P2). >
The results of this study were published on November 24 in Science Advances. (Paper title: Anthropogenic warming induced intensification of summer monsoon frontal precipitation over East Asia)
This research was conducted with support from the National Research Foundation of Korea's Overseas Scientist Attraction Project (BP+) and the Anthropocene Research Center.
2023.12.05 View 6256
The Relentless Rain: East Asia's Recent Floods and What Lies Beneath
In just a month's time, East Asia witnessed torrential downpours that would usually span an entire season. Japan, battered by three times its usual monthly rainfall, faced landslides and flooding that claimed over 200 lives. Meanwhile, South Korea grappled with its longest monsoon in seven years, leaving more than 40 individuals dead or missing. But these events, as harrowing as they sound, are more than just weather anomalies. They're telltale signs, symptoms of a larger malaise that has gripped our planet.
Diving deep into these rain-soaked mysteries, a recently published paper in the journal Science Advances offers a fresh perspective. Led by a research team at the Korea Advanced Institute of Science and Technology (KAIST), Korea, the research unpacks the influence of human-induced climate changes on the East Asia Summer Monsoon frontal system.
Heavy summer rain has a significant impact on agriculture and industry, and can be said to be one of the greatest threats to human society by causing disasters such as floods and landslides, affecting the local ecosystem. It has been reported from all over the world that the intensity of summer heavy rain has changed over the past few decades. However, summer rain in East Asia is caused by various forms such as typhoons, extratropical cyclones, and fronts, and efforts to study heavy frontal rain, which account for more than 40% of summer rainfall, is still insufficient. In addition, because heavy rain is also influenced by natural fluctuations or coincidences in the climate system, it is not yet known to what extent warming due to human activities affects the intensity of heavy frontal precipitation.
An international joint research team consisting of eight institutions from Korea, the United States, and Japan, including KAIST, Tokyo University, Tokyo Institute of Technology, Chonnam National University, GIST, and Utah State University, confirmed the intensity of heavy rain caused by the weather fronts in East Asia using observation data for the past 60 years and found that the coast of southeastern China. It was found that the intensity of heavy rain increased by about 17% across the Korean Peninsula and Japan. To investigate the cause of these changes, the research team used the Earth Metaverse experiment, which simulated Earth with and without greenhouse gas emissions due to human activities, and found that heavy rain intensity was strengthened by about 6% due to greenhouse gas emissions, and the changes discovered were has succeeded for the first time in the world in showing that warming cannot be explained without the effects of human activities.
< Figure 1. (Left) Observed difference in frontal rainfall intensity (FRI) from the later (1991–2015) to the earlier periods (1958–1982) (Right) Visualization of the impact of anthropogenic warming on the intensity of heavy frontal rain analyzed using the Earth Metaverse experiment. >
"It's not just about connecting the dots," said Moon, the first author of the paper, "it's about seeing the larger pattern. Our data analysis reveals a clear and intensified trend in East Asia's frontal rainfall, one that's intertwined with human actions and increasingly harmful for lives and property."
One of the intriguing finds from the study is the mechanics behind this intensification. The team found increased moisture transport due to a warmer climate, which, when coupled with the strengthening of a gigantic weather system called the West North Pacific Subtropical High, results in enhanced frontal rainfall. It’s akin to the climate dialing up the volume on rain events. As the atmosphere warms, it holds more moisture, leading to heavier downpours when conditions are right.
Nobuyuki Utsumi, another voice from the team, makes the science accessible for all, saying, "Monsoon rain isn't just rain anymore. The frequency, the intensity, it's changing. And our actions, our carbon footprint, are casting a larger shadow than we anticipated."
While the devastating news of floods fills headlines, Professor Simon Wang of Utah State University, reminds us of the underlying importance of their study. "It's like reading a detective novel. To solve the mystery of these floods, one has to trace them back to their roots. This work hints at a future where such intense rain events aren't the exception but might become an everyday reality."
Hyungjun Kim, the principal investigator of the team throws in a note of caution, "Understanding this is just the first step. Predicting and preparing for these extremes is the real challenge. Every amplified rainfall event is a message from the future, urging us to adapt." So far, predicting rainfall intensity and locations remains a challenging task for even the most sophisticated weather models.
< Figure 2. Comparison of rates of change in Anthropocene fingerprints. The horizontal axis shows the long-term change slope of the Anthropocene fingerprint signal (1958 to 2015). Shows the probability distribution of slopes extracted from the non-warming experiment (blue) and the warming experiment (red). The vertical solid lines are the slope of the Anthropocene fingerprint signal extracted from observational data. >
The researchers say, “Facing climate change, the narrative of this new study is more than mere numbers and data. It's a story of our planet, our actions, and the rain-soaked repercussions we're beginning to face. As we mop up the aftermath of another flood, research like Moon's beckons us to look deeper, understand better, and act wiser.”
< Figure 3. Comparison of water vapor convergence and rate of change of the western North Pacific high pressure. Shows the gradient of change in water vapor convergence (horizontal axis) and the Northwestern Pacific-East Asia pressure gradient (vertical axis) extracted from warming (red) and non-warming (blue) experiments. Shows the distribution of slope changes of the two indices during the period 1958 to 1982 (P1) and 1991 to 2015 (P2). >
The results of this study were published on November 24 in Science Advances. (Paper title: Anthropogenic warming induced intensification of summer monsoon frontal precipitation over East Asia)
This research was conducted with support from the National Research Foundation of Korea's Overseas Scientist Attraction Project (BP+) and the Anthropocene Research Center.
2023.12.05 View 6256 -
 2023 Global Startup Internship Seminar (GSIS)
The Center for Global Strategies and Planning at KAIST hosted the 2023 Global Startup Internship Seminar (GSIS) both online and offline from November 29th to December 1st.
Following the success of the 2022 Global Startup Internship Fair (GSIF), the 2023 KAIST GSIS was organized in an enhanced format. This event provided students with the opportunity to explore internship opportunities with U.S. startups. Six startups in the fields of AI, bio, digital healthcare, drones, and e-commerce, Imprimed, Soundable Health, Vessl AI, B Garage, UNEEKOR, and Bringko, all founded by KAIST alumni, were invited. More than 80 KAIST students registered in advance to participate in the event.
The participating companies in this seminar shared who they and what they do and provided career mentoring for KAIST students. Catherine Song, the CEO of Soundable Health and a KAIST alumna, said, "It is very meaningful to introduce our company to KAIST students and provide them with the opportunity to take part in global internships."
In addition to startup company information and mentoring sessions, the seminar included sessions on preparing CVs, cover letters, and business emails for U.S. internships, and how to settle in Silicon Valley. Internship experiences were also shared by current KAIST students. Finally, a J-1 visa information session was conducted, providing useful tips for students preparing for U.S. internships.
Man-Sung Yim, the Vice President of the International Office at KAIST, said, "We hope that KAIST students, who have nurtured a global entrepreneurial spirit through this event, will grow into aspiring entrepreneurs with confidence on the global stage." He also mentioned plans to leverage the success of this event by connecting it with other KAIST global entrepreneurship programs.
2023.12.05 View 6989
2023 Global Startup Internship Seminar (GSIS)
The Center for Global Strategies and Planning at KAIST hosted the 2023 Global Startup Internship Seminar (GSIS) both online and offline from November 29th to December 1st.
Following the success of the 2022 Global Startup Internship Fair (GSIF), the 2023 KAIST GSIS was organized in an enhanced format. This event provided students with the opportunity to explore internship opportunities with U.S. startups. Six startups in the fields of AI, bio, digital healthcare, drones, and e-commerce, Imprimed, Soundable Health, Vessl AI, B Garage, UNEEKOR, and Bringko, all founded by KAIST alumni, were invited. More than 80 KAIST students registered in advance to participate in the event.
The participating companies in this seminar shared who they and what they do and provided career mentoring for KAIST students. Catherine Song, the CEO of Soundable Health and a KAIST alumna, said, "It is very meaningful to introduce our company to KAIST students and provide them with the opportunity to take part in global internships."
In addition to startup company information and mentoring sessions, the seminar included sessions on preparing CVs, cover letters, and business emails for U.S. internships, and how to settle in Silicon Valley. Internship experiences were also shared by current KAIST students. Finally, a J-1 visa information session was conducted, providing useful tips for students preparing for U.S. internships.
Man-Sung Yim, the Vice President of the International Office at KAIST, said, "We hope that KAIST students, who have nurtured a global entrepreneurial spirit through this event, will grow into aspiring entrepreneurs with confidence on the global stage." He also mentioned plans to leverage the success of this event by connecting it with other KAIST global entrepreneurship programs.
2023.12.05 View 6989 -
 An intravenous needle that irreversibly softens via body temperature on insertion
- A joint research team at KAIST developed an intravenous (IV) needle that softens upon insertion, minimizing risk of damage to blood vessels and tissues.
- Once used, it remains soft even at room temperature, preventing accidental needle stick injuries and unethical multiple use of needle.
- A thin-film temperature sensor can be embedded with this needle, enabling real-time monitoring of the patient's core body temperature, or detection of unintended fluid leakage, during IV medication.
Intravenous (IV) injection is a method commonly used in patient’s treatment worldwide as it induces rapid effects and allows treatment through continuous administration of medication by directly injecting drugs into the blood vessel. However, medical IV needles, made of hard materials such as stainless steel or plastic which do not mechanically match the soft biological tissues of the body, can cause critical problems in healthcare settings, starting from minor tissue damages in the injection sites to serious inflammations.
The structure and dexterity of rigid medical IV devices also enable unethical reuse of needles for reduction of injection costs, leading to transmission of deadly blood-borne disease infections such as human immunodeficiency virus (HIV) and hepatitis B/C viruses. Furthermore, unintended needlestick injuries are frequently occurring in medical settings worldwide, that are viable sources of such infections, with IV needles having the greatest susceptibility of being the medium of transmissible diseases. For these reasons, the World Health Organization (WHO) in 2015 launched a policy on safe injection practices to encourage the development and use of “smart” syringes that have features to prevent re-use, after a tremendous increase in the number of deadly infectious disease worldwide due to medical-sharps related issues.
KAIST announced on the 13th that Professor Jae-Woong Jeong and his research team of its School of Electrical Engineering succeeded in developing the Phase-Convertible, Adapting and non-REusable (P-CARE) needle with variable stiffness that can improve patient health and ensure the safety of medical staff through convergent joint research with another team led by Professor Won-Il Jeong of the Graduate School of Medical Sciences.
The new technology is expected to allow patients to move without worrying about pain at the injection site as it reduces the risk of damage to the wall of the blood vessel as patients receive IV medication. This is possible with the needle’s stiffness-tunable characteristics which will make it soft and flexible upon insertion into the body due to increased temperature, adapting to the movement of thin-walled vein. It is also expected to prevent blood-borne disease infections caused by accidental needlestick injuries or unethical re-using of syringes as the deformed needle remains perpetually soft even after it is retracted from the injection site.
The results of this research, in which Karen-Christian Agno, a doctoral researcher of the School of Electrical Engineering at and Dr. Keungmo Yang of the Graduate School of Medical Sciences participated as co-first authors, was published in Nature Biomedical Engineering on October 30. (Paper title: A temperature-responsive intravenous needle that irreversibly softens on insertion)
< Figure 1. Disposable variable stiffness intravenous needle. (a) Conceptual illustration of the key features of the P-CARE needle whose mechanical properties can be changed by body temperature, (b) Photograph of commonly used IV access devices and the P-CARE needle, (c) Performance of common IV access devices and the P-CARE needle >
“We’ve developed this special needle using advanced materials and micro/nano engineering techniques, and it can solve many global problems related to conventional medical needles used in healthcare worldwide”, said Jae-Woong Jeong, Ph.D., an associate professor of Electrical Engineering at KAIST and a lead senior author of the study.
The softening IV needle created by the research team is made up of liquid metal gallium that forms the hollow, mechanical needle frame encapsulated within an ultra-soft silicone material. In its solid state, gallium has sufficient hardness that enables puncturing of soft biological tissues. However, gallium melts when it is exposed to body temperature upon insertion, and changes it into a soft state like the surrounding tissue, enabling stable delivery of the drug without damaging blood vessels. Once used, a needle remains soft even at room temperature due to the supercooling phenomenon of gallium, fundamentally preventing needlestick accidents and reuse problems.
Biocompatibility of the softening IV needle was validated through in vivo studies in mice. The studies showed that implanted needles caused significantly less inflammation relative to the standard IV access devices of similar size made of metal needles or plastic catheters. The study also confirmed the new needle was able to deliver medications as reliably as commercial injection needles.
< Photo 1. Photo of the P-CARE needle that softens with body temperature. >
Researchers also showed possibility of integrating a customized ultra-thin temperature sensor with the softening IV needle to measure the on-site temperature which can further enhance patient’s well-being. The single assembly of sensor-needle device can be used to monitor the core body temperature, or even detect if there is a fluid leakage on-site during indwelling use, eliminating the need for additional medical tools or procedures to provide the patients with better health care services.
The researchers believe that this transformative IV needle can open new opportunities for wide range of applications particularly in clinical setups, in terms of redesigning other medical needles and sharp medical tools to reduce muscle tissue injury during indwelling use. The softening IV needle may become even more valuable in the present times as there is an estimated 16 billion medical injections administered annually in a global scale, yet not all needles are disposed of properly, based on a 2018 WHO report.
< Figure 2. Biocompatibility test for P-CARE needle: Images of H&E stained histology (the area inside the dashed box on the left is provided in an expanded view in the right), TUNEL staining (green), DAPI staining of nuclei (blue) and co-staining (TUNEL and DAPI) of muscle tissue from different organs. >
< Figure 3. Conceptual images of potential utilization for temperature monitoring function of P-CARE needle integrated with a temperature sensor. >
(a) Schematic diagram of injecting a drug through intravenous injection into the abdomen of a laboratory mouse (b) Change of body temperature upon injection of drug (c) Conceptual illustration of normal intravenous drug injection (top) and fluid leakage (bottom) (d) Comparison of body temperature during normal drug injection and fluid leakage: when the fluid leak occur due to incorrect insertion, a sudden drop of temperature is detected.
This work was supported by grants from the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT.
2023.11.13 View 9522
An intravenous needle that irreversibly softens via body temperature on insertion
- A joint research team at KAIST developed an intravenous (IV) needle that softens upon insertion, minimizing risk of damage to blood vessels and tissues.
- Once used, it remains soft even at room temperature, preventing accidental needle stick injuries and unethical multiple use of needle.
- A thin-film temperature sensor can be embedded with this needle, enabling real-time monitoring of the patient's core body temperature, or detection of unintended fluid leakage, during IV medication.
Intravenous (IV) injection is a method commonly used in patient’s treatment worldwide as it induces rapid effects and allows treatment through continuous administration of medication by directly injecting drugs into the blood vessel. However, medical IV needles, made of hard materials such as stainless steel or plastic which do not mechanically match the soft biological tissues of the body, can cause critical problems in healthcare settings, starting from minor tissue damages in the injection sites to serious inflammations.
The structure and dexterity of rigid medical IV devices also enable unethical reuse of needles for reduction of injection costs, leading to transmission of deadly blood-borne disease infections such as human immunodeficiency virus (HIV) and hepatitis B/C viruses. Furthermore, unintended needlestick injuries are frequently occurring in medical settings worldwide, that are viable sources of such infections, with IV needles having the greatest susceptibility of being the medium of transmissible diseases. For these reasons, the World Health Organization (WHO) in 2015 launched a policy on safe injection practices to encourage the development and use of “smart” syringes that have features to prevent re-use, after a tremendous increase in the number of deadly infectious disease worldwide due to medical-sharps related issues.
KAIST announced on the 13th that Professor Jae-Woong Jeong and his research team of its School of Electrical Engineering succeeded in developing the Phase-Convertible, Adapting and non-REusable (P-CARE) needle with variable stiffness that can improve patient health and ensure the safety of medical staff through convergent joint research with another team led by Professor Won-Il Jeong of the Graduate School of Medical Sciences.
The new technology is expected to allow patients to move without worrying about pain at the injection site as it reduces the risk of damage to the wall of the blood vessel as patients receive IV medication. This is possible with the needle’s stiffness-tunable characteristics which will make it soft and flexible upon insertion into the body due to increased temperature, adapting to the movement of thin-walled vein. It is also expected to prevent blood-borne disease infections caused by accidental needlestick injuries or unethical re-using of syringes as the deformed needle remains perpetually soft even after it is retracted from the injection site.
The results of this research, in which Karen-Christian Agno, a doctoral researcher of the School of Electrical Engineering at and Dr. Keungmo Yang of the Graduate School of Medical Sciences participated as co-first authors, was published in Nature Biomedical Engineering on October 30. (Paper title: A temperature-responsive intravenous needle that irreversibly softens on insertion)
< Figure 1. Disposable variable stiffness intravenous needle. (a) Conceptual illustration of the key features of the P-CARE needle whose mechanical properties can be changed by body temperature, (b) Photograph of commonly used IV access devices and the P-CARE needle, (c) Performance of common IV access devices and the P-CARE needle >
“We’ve developed this special needle using advanced materials and micro/nano engineering techniques, and it can solve many global problems related to conventional medical needles used in healthcare worldwide”, said Jae-Woong Jeong, Ph.D., an associate professor of Electrical Engineering at KAIST and a lead senior author of the study.
The softening IV needle created by the research team is made up of liquid metal gallium that forms the hollow, mechanical needle frame encapsulated within an ultra-soft silicone material. In its solid state, gallium has sufficient hardness that enables puncturing of soft biological tissues. However, gallium melts when it is exposed to body temperature upon insertion, and changes it into a soft state like the surrounding tissue, enabling stable delivery of the drug without damaging blood vessels. Once used, a needle remains soft even at room temperature due to the supercooling phenomenon of gallium, fundamentally preventing needlestick accidents and reuse problems.
Biocompatibility of the softening IV needle was validated through in vivo studies in mice. The studies showed that implanted needles caused significantly less inflammation relative to the standard IV access devices of similar size made of metal needles or plastic catheters. The study also confirmed the new needle was able to deliver medications as reliably as commercial injection needles.
< Photo 1. Photo of the P-CARE needle that softens with body temperature. >
Researchers also showed possibility of integrating a customized ultra-thin temperature sensor with the softening IV needle to measure the on-site temperature which can further enhance patient’s well-being. The single assembly of sensor-needle device can be used to monitor the core body temperature, or even detect if there is a fluid leakage on-site during indwelling use, eliminating the need for additional medical tools or procedures to provide the patients with better health care services.
The researchers believe that this transformative IV needle can open new opportunities for wide range of applications particularly in clinical setups, in terms of redesigning other medical needles and sharp medical tools to reduce muscle tissue injury during indwelling use. The softening IV needle may become even more valuable in the present times as there is an estimated 16 billion medical injections administered annually in a global scale, yet not all needles are disposed of properly, based on a 2018 WHO report.
< Figure 2. Biocompatibility test for P-CARE needle: Images of H&E stained histology (the area inside the dashed box on the left is provided in an expanded view in the right), TUNEL staining (green), DAPI staining of nuclei (blue) and co-staining (TUNEL and DAPI) of muscle tissue from different organs. >
< Figure 3. Conceptual images of potential utilization for temperature monitoring function of P-CARE needle integrated with a temperature sensor. >
(a) Schematic diagram of injecting a drug through intravenous injection into the abdomen of a laboratory mouse (b) Change of body temperature upon injection of drug (c) Conceptual illustration of normal intravenous drug injection (top) and fluid leakage (bottom) (d) Comparison of body temperature during normal drug injection and fluid leakage: when the fluid leak occur due to incorrect insertion, a sudden drop of temperature is detected.
This work was supported by grants from the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT.
2023.11.13 View 9522 -
 KAIST proposes alternatives to chemical factories through “iBridge”
- A computer simulation program “iBridge” was developed at KAIST that can put together microbial cell factories quickly and efficiently to produce cosmetics and food additives, and raw materials for nylons
- Eco-friendly and sustainable fermentation process to establish an alternative to chemical plants
As climate change and environmental concerns intensify, sustainable microbial cell factories garner significant attention as candidates to replace chemical plants. To develop microorganisms to be used in the microbial cell factories, it is crucial to modify their metabolic processes to induce efficient target chemical production by modulating its gene expressions. Yet, the challenge persists in determining which gene expressions to amplify and suppress, and the experimental verification of these modification targets is a time- and resource-intensive process even for experts. The challenges were addressed by a team of researchers at KAIST (President Kwang-Hyung Lee) led by Distinguished Professor Sang Yup Lee.
It was announced on the 9th by the school that a method for building a microbial factory at low cost, quickly and efficiently, was presented by a novel computer simulation program developed by the team under Professor Lee’s guidance, which is named “iBridge”. This innovative system is designed to predict gene targets to either overexpress or downregulate in the goal of producing a desired compound to enable the cost-effective and efficient construction of microbial cell factories specifically tailored for producing the chemical compound in demand from renewable biomass.
Systems metabolic engineering is a field of research and engineering pioneered by KAIST’s Distinguished Professor Sang Yup Lee that seeks to produce valuable compounds in industrial demands using microorganisms that are re-configured by a combination of methods including, but not limited to, metabolic engineering, synthetic biology, systems biology, and fermentation engineering.
In order to improve microorganisms’ capability to produce useful compounds, it is essential to delete, suppress, or overexpress microbial genes. However, it is difficult even for the experts to identify the gene targets to modify without experimental confirmations for each of them, which can take up immeasurable amount of time and resources.
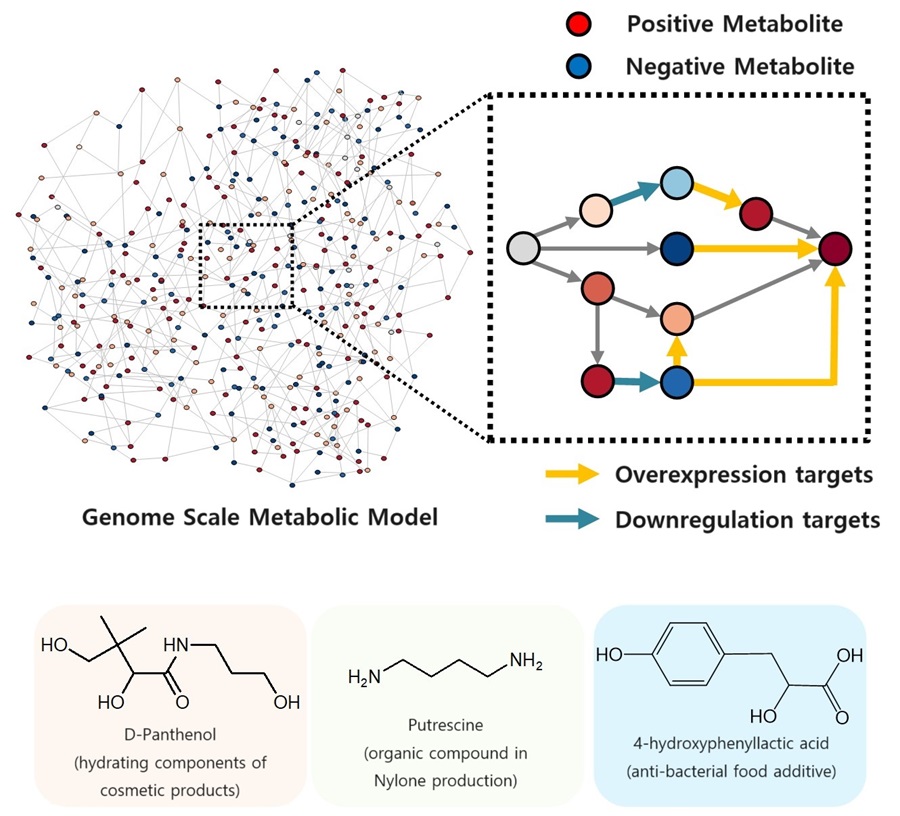
The newly developed iBridge identifies positive and negative metabolites within cells, which exert positive and/or negative impact on formation of the products, by calculating the sum of covariances of their outgoing (consuming) reaction fluxes for a target chemical. Subsequently, it pinpoints "bridge" reactions responsible for converting negative metabolites into positive ones as candidates for overexpression, while identifying the opposites as targets for downregulation.
The research team successfully utilized the iBridge simulation to establish E. coli microbial cell factories each capable of producing three of the compounds that are in high demands at a production capacity that has not been reported around the world. They developed E. coli strains that can each produce panthenol, a moisturizing agent found in many cosmetics, putrescine, which is one of the key components in nylon production, and 4-hydroxyphenyllactic acid, an anti-bacterial food additive. In addition to these three compounds, the study presents predictions for overexpression and suppression genes to construct microbial factories for 298 other industrially valuable compounds.
Dr. Youngjoon Lee, the co-first author of this paper from KAIST, emphasized the accelerated construction of various microbial factories the newly developed simulation enabled. He stated, "With the use of this simulation, multiple microbial cell factories have been established significantly faster than it would have been using the conventional methods. Microbial cell factories producing a wider range of valuable compounds can now be constructed quickly using this technology."
Professor Sang Yup Lee said, "Systems metabolic engineering is a crucial technology for addressing the current climate change issues." He added, "This simulation could significantly expedite the transition from resorting to conventional chemical factories to utilizing environmentally friendly microbial factories."
< Figure. Conceptual diagram of the flow of iBridge simulation >
The team’s work on iBridge is described in a paper titled "Genome-Wide Identification of Overexpression and Downregulation Gene Targets Based on the Sum of Covariances of the Outgoing Reaction Fluxes" written by Dr. Won Jun Kim, and Dr. Youngjoon Lee of the Bioprocess Research Center and Professors Hyun Uk Kim and Sang Yup Lee of the Department of Chemical and Biomolecular Engineering of KAIST. The paper was published via peer-review on the 6th of November on “Cell Systems” by Cell Press.
This research was conducted with the support from the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project (Project Leader: Distinguished Professor Sang Yup Lee, KAIST) and Development of Platform Technology for the Production of Novel Aromatic Bioplastic using Microbial Cell Factories Project (Project Leader: Research Professor So Young Choi, KAIST) of the Korean Ministry of Science and ICT.
2023.11.09 View 8527
KAIST proposes alternatives to chemical factories through “iBridge”
- A computer simulation program “iBridge” was developed at KAIST that can put together microbial cell factories quickly and efficiently to produce cosmetics and food additives, and raw materials for nylons
- Eco-friendly and sustainable fermentation process to establish an alternative to chemical plants
As climate change and environmental concerns intensify, sustainable microbial cell factories garner significant attention as candidates to replace chemical plants. To develop microorganisms to be used in the microbial cell factories, it is crucial to modify their metabolic processes to induce efficient target chemical production by modulating its gene expressions. Yet, the challenge persists in determining which gene expressions to amplify and suppress, and the experimental verification of these modification targets is a time- and resource-intensive process even for experts. The challenges were addressed by a team of researchers at KAIST (President Kwang-Hyung Lee) led by Distinguished Professor Sang Yup Lee.
It was announced on the 9th by the school that a method for building a microbial factory at low cost, quickly and efficiently, was presented by a novel computer simulation program developed by the team under Professor Lee’s guidance, which is named “iBridge”. This innovative system is designed to predict gene targets to either overexpress or downregulate in the goal of producing a desired compound to enable the cost-effective and efficient construction of microbial cell factories specifically tailored for producing the chemical compound in demand from renewable biomass.
Systems metabolic engineering is a field of research and engineering pioneered by KAIST’s Distinguished Professor Sang Yup Lee that seeks to produce valuable compounds in industrial demands using microorganisms that are re-configured by a combination of methods including, but not limited to, metabolic engineering, synthetic biology, systems biology, and fermentation engineering.
In order to improve microorganisms’ capability to produce useful compounds, it is essential to delete, suppress, or overexpress microbial genes. However, it is difficult even for the experts to identify the gene targets to modify without experimental confirmations for each of them, which can take up immeasurable amount of time and resources.
The newly developed iBridge identifies positive and negative metabolites within cells, which exert positive and/or negative impact on formation of the products, by calculating the sum of covariances of their outgoing (consuming) reaction fluxes for a target chemical. Subsequently, it pinpoints "bridge" reactions responsible for converting negative metabolites into positive ones as candidates for overexpression, while identifying the opposites as targets for downregulation.
The research team successfully utilized the iBridge simulation to establish E. coli microbial cell factories each capable of producing three of the compounds that are in high demands at a production capacity that has not been reported around the world. They developed E. coli strains that can each produce panthenol, a moisturizing agent found in many cosmetics, putrescine, which is one of the key components in nylon production, and 4-hydroxyphenyllactic acid, an anti-bacterial food additive. In addition to these three compounds, the study presents predictions for overexpression and suppression genes to construct microbial factories for 298 other industrially valuable compounds.
Dr. Youngjoon Lee, the co-first author of this paper from KAIST, emphasized the accelerated construction of various microbial factories the newly developed simulation enabled. He stated, "With the use of this simulation, multiple microbial cell factories have been established significantly faster than it would have been using the conventional methods. Microbial cell factories producing a wider range of valuable compounds can now be constructed quickly using this technology."
Professor Sang Yup Lee said, "Systems metabolic engineering is a crucial technology for addressing the current climate change issues." He added, "This simulation could significantly expedite the transition from resorting to conventional chemical factories to utilizing environmentally friendly microbial factories."
< Figure. Conceptual diagram of the flow of iBridge simulation >
The team’s work on iBridge is described in a paper titled "Genome-Wide Identification of Overexpression and Downregulation Gene Targets Based on the Sum of Covariances of the Outgoing Reaction Fluxes" written by Dr. Won Jun Kim, and Dr. Youngjoon Lee of the Bioprocess Research Center and Professors Hyun Uk Kim and Sang Yup Lee of the Department of Chemical and Biomolecular Engineering of KAIST. The paper was published via peer-review on the 6th of November on “Cell Systems” by Cell Press.
This research was conducted with the support from the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project (Project Leader: Distinguished Professor Sang Yup Lee, KAIST) and Development of Platform Technology for the Production of Novel Aromatic Bioplastic using Microbial Cell Factories Project (Project Leader: Research Professor So Young Choi, KAIST) of the Korean Ministry of Science and ICT.
2023.11.09 View 8527 -
 NYU-KAIST Global AI & Digital Governance Conference Held
< Photo 1. Opening of NYU-KAIST Global AI & Digital Governance Conference >
In attendance of the Minister of Science and ICT Jong-ho Lee, NYU President Linda G. Mills, and KAIST President Kwang Hyung Lee, KAIST co-hosted the NYU-KAIST Global AI & Digital Governance Conference at the Paulson Center of New York University (NYU) in New York City, USA on September 21st, 9:30 pm.
At the conference, KAIST and NYU discussed the direction and policies for ‘global AI and digital governance’ with participants of upto 300 people which includes scholars, professors, and students involved in the academic field of AI and digitalization from both Korea and the United States and other international backgrounds. This conference was a forum of an international discussion that sought new directions for AI and digital technology take in the future and gathered consensus on regulations.
Following a welcoming address by KAIST President, Kwang Hyung Lee and a congratulatory message from the Minister of Science and ICT, Jong-ho Lee, a panel discussion was held, moderated by Professor Matthew Liao, a graduate of Princeton and Oxford University, currently serving as a professor at NYU and the director at the Center for Bioethics of the NYU School of Global Public Health.
Six prominent scholars took part in the panel discussion. Prof. Kyung-hyun Cho of NYU Applied Mathematics and Data Science Center, a KAIST graduate who has joined the ranks of the world-class in AI language models and Professor Jong Chul Ye, the Director of Promotion Council for Digital Health at KAIST, who is leading innovative research in the field of medical AI working in collaboration with major hospitals at home and abroad was on the panel. Additionally, Professor Luciano Floridi, a founding member of the Yale University Center for Digital Ethics, Professor Shannon Vallor, the Baillie Gifford Professor in the Ethics of Data and Artificial Intelligence at the University of Edinburgh of the UK, Professor Stefaan Verhulst, a Co-Founder and the DIrector of GovLab‘s Data Program at NYU’s Tandon School of Engineering, and Professor Urs Gasser, who is in charge of public policy, governance and innovative technology at the Technical University of Munich, also participated.
Professor Matthew Liao from NYU led the discussion on various topics such as the ways to to regulate AI and digital technologies; the concerns about how deep learning technology being developed in medicinal purposes could be used in warfare; the scope of responsibilities Al scientists' responsibility should carry in ensuring the usage of AI are limited to benign purposes only; the effects of external regulation on the AI model developers and the research they pursue; and on the lessons that can be learned from the regulations in other fields.
During the panel discussion, there was an exchange of ideas about a system of standards that could harmonize digital development and regulatory and social ethics in today’s situation in which digital transformation accelerates technological development at a global level, there is a looming concern that while such advancements are bringing economic vitality it may create digital divides and probles like manipulation of public opinion. Professor Jong-cheol Ye of KAIST (Director of the Promotion Council for Digital Health), in particular, emphasized that it is important to find a point of balance that does not hinder the advancements rather than opting to enforcing strict regulations.
< Photo 2. Panel Discussion in Session at NYU-KAIST Global AI & Digital Governance Conference >
KAIST President Kwang Hyung Lee explained, “At the Digital Governance Forum we had last October, we focused on exploring new governance to solve digital challenges in the time of global digital transition, and this year’s main focus was on regulations.”
“This conference served as an opportunity of immense value as we came to understand that appropriate regulations can be a motivation to spur further developments rather than a hurdle when it comes to technological advancements, and that it is important for us to clearly understand artificial intelligence and consider what should and can be regulated when we are to set regulations on artificial intelligence,” he continued.
Earlier, KAIST signed a cooperation agreement with NYU to build a joint campus, June last year and held a plaque presentation ceremony for the KAIST NYU Joint Campus last September to promote joint research between the two universities. KAIST is currently conducting joint research with NYU in nine fields, including AI and digital research. The KAIST-NYU Joint Campus was conceived with the goal of building an innovative sandbox campus centering aroung science, technology, engineering, and mathematics (STEM) combining NYU's excellent humanities and arts as well as basic science and convergence research capabilities with KAIST's science and technology.
KAIST has contributed to the development of Korea's industry and economy through technological innovation aiding in the nation’s transformation into an innovative nation with scientific and technological prowess. KAIST will now pursue an anchor/base strategy to raise KAIST's awareness in New York through the NYU Joint Campus by establishing a KAIST campus within the campus of NYU, the heart of New York.
2023.09.22 View 11548
NYU-KAIST Global AI & Digital Governance Conference Held
< Photo 1. Opening of NYU-KAIST Global AI & Digital Governance Conference >
In attendance of the Minister of Science and ICT Jong-ho Lee, NYU President Linda G. Mills, and KAIST President Kwang Hyung Lee, KAIST co-hosted the NYU-KAIST Global AI & Digital Governance Conference at the Paulson Center of New York University (NYU) in New York City, USA on September 21st, 9:30 pm.
At the conference, KAIST and NYU discussed the direction and policies for ‘global AI and digital governance’ with participants of upto 300 people which includes scholars, professors, and students involved in the academic field of AI and digitalization from both Korea and the United States and other international backgrounds. This conference was a forum of an international discussion that sought new directions for AI and digital technology take in the future and gathered consensus on regulations.
Following a welcoming address by KAIST President, Kwang Hyung Lee and a congratulatory message from the Minister of Science and ICT, Jong-ho Lee, a panel discussion was held, moderated by Professor Matthew Liao, a graduate of Princeton and Oxford University, currently serving as a professor at NYU and the director at the Center for Bioethics of the NYU School of Global Public Health.
Six prominent scholars took part in the panel discussion. Prof. Kyung-hyun Cho of NYU Applied Mathematics and Data Science Center, a KAIST graduate who has joined the ranks of the world-class in AI language models and Professor Jong Chul Ye, the Director of Promotion Council for Digital Health at KAIST, who is leading innovative research in the field of medical AI working in collaboration with major hospitals at home and abroad was on the panel. Additionally, Professor Luciano Floridi, a founding member of the Yale University Center for Digital Ethics, Professor Shannon Vallor, the Baillie Gifford Professor in the Ethics of Data and Artificial Intelligence at the University of Edinburgh of the UK, Professor Stefaan Verhulst, a Co-Founder and the DIrector of GovLab‘s Data Program at NYU’s Tandon School of Engineering, and Professor Urs Gasser, who is in charge of public policy, governance and innovative technology at the Technical University of Munich, also participated.
Professor Matthew Liao from NYU led the discussion on various topics such as the ways to to regulate AI and digital technologies; the concerns about how deep learning technology being developed in medicinal purposes could be used in warfare; the scope of responsibilities Al scientists' responsibility should carry in ensuring the usage of AI are limited to benign purposes only; the effects of external regulation on the AI model developers and the research they pursue; and on the lessons that can be learned from the regulations in other fields.
During the panel discussion, there was an exchange of ideas about a system of standards that could harmonize digital development and regulatory and social ethics in today’s situation in which digital transformation accelerates technological development at a global level, there is a looming concern that while such advancements are bringing economic vitality it may create digital divides and probles like manipulation of public opinion. Professor Jong-cheol Ye of KAIST (Director of the Promotion Council for Digital Health), in particular, emphasized that it is important to find a point of balance that does not hinder the advancements rather than opting to enforcing strict regulations.
< Photo 2. Panel Discussion in Session at NYU-KAIST Global AI & Digital Governance Conference >
KAIST President Kwang Hyung Lee explained, “At the Digital Governance Forum we had last October, we focused on exploring new governance to solve digital challenges in the time of global digital transition, and this year’s main focus was on regulations.”
“This conference served as an opportunity of immense value as we came to understand that appropriate regulations can be a motivation to spur further developments rather than a hurdle when it comes to technological advancements, and that it is important for us to clearly understand artificial intelligence and consider what should and can be regulated when we are to set regulations on artificial intelligence,” he continued.
Earlier, KAIST signed a cooperation agreement with NYU to build a joint campus, June last year and held a plaque presentation ceremony for the KAIST NYU Joint Campus last September to promote joint research between the two universities. KAIST is currently conducting joint research with NYU in nine fields, including AI and digital research. The KAIST-NYU Joint Campus was conceived with the goal of building an innovative sandbox campus centering aroung science, technology, engineering, and mathematics (STEM) combining NYU's excellent humanities and arts as well as basic science and convergence research capabilities with KAIST's science and technology.
KAIST has contributed to the development of Korea's industry and economy through technological innovation aiding in the nation’s transformation into an innovative nation with scientific and technological prowess. KAIST will now pursue an anchor/base strategy to raise KAIST's awareness in New York through the NYU Joint Campus by establishing a KAIST campus within the campus of NYU, the heart of New York.
2023.09.22 View 11548 -
 KAIST holds its first ‘KAIST Tech Fair’ in New York, USA
< Photo 1. 2023 KAIST Tech Fair in New York >
KAIST (President Kwang-Hyung Lee) announced on the 11th that it will hold the ‘2023 KAIST Tech Fair in New York’ at the Kimmel Center at New York University in Manhattan, USA, on the 22nd of this month. It is an event designed to be the starting point for KAIST to expand its startup ecosystem into the global stage, and it is to attract investments and secure global customers in New York by demonstrating the technological value of KAIST startup companies directly at location.
< Photo 2. President Kwang Hyung Lee at the 2023 KAIST Tech Fair in New York >
KAIST has been holding briefing sessions for technology transfer in Korea every year since 2018, and this year is the first time to hold a tech fair overseas for global companies.
KAIST Institute of Technology Value Creation (Director Sung-Yool Choi) has prepared for this event over the past six months with the Korea International Trade Association (hereinafter KITA, CEO Christopher Koo) to survey customer base and investment companies to conduct market analysis.
Among the companies founded with the technologies developed by the faculty and students of KAIST and their partners, 7 companies were selected to be matched with companies overseas that expressed interests in these technologies. Global multinational companies in the fields of IT, artificial intelligence, environment, logistics, distribution, and retail are participating as demand agencies and are testing the marketability of the start-up's technology as of September.
Daim Research, founded by Professor Young Jae Jang of the Department of Industrial and Systems Engineering, is a company specializing in smart factory automation solutions and is knocking on the door of the global market with a platform technology optimized for automated logistics systems.
< Photo 3. Presentation by Professor Young Jae Jang for DAIM Research >
It is a ‘collaborative intelligence’ solution that maximizes work productivity by having a number of robots used in industrial settings collaborate with one another. The strength of their solution is that logistics robots equipped with AI reinforced learning technology can respond to processes and environmental changes on their own, minimizing maintenance costs and the system can achieve excellent performance even with a small amount of data when it is combined with the digital twin technology the company has developed on its own.
A student startup, ‘Aniai’, is entering the US market, the home of hamburgers, with hamburger patty automation equipments and solutions. This is a robot kitchen startup founded by its CEO Gunpil Hwang, a graduate of KAIST’s School of Electrical Engineering which gathered together the experts in the fields of robot control, design, and artificial intelligence and cognitive technology to develop technology to automatically cook hamburger patties.
At the touch of a button, both sides of the patty are cooked simultaneously for consistent taste and quality according to the set condition. Since it can cook about 200 dishes in an hour, it is attracting attention as a technology that can not only solve manpower shortages but also accelerate the digital transformation of the restaurant industry.
Also, at the tech fair to be held at the Kimmel Center of New York University on the 22nd, the following startups who are currently under market verification in the U.S. will be participating: ▴'TheWaveTalk', which developed a water quality management system that can measure external substances and metal ions by transferring original technology from KAIST; ▴‘VIRNECT’, which helps workers improve their skills by remotely managing industrial sites using XR*; ▴‘Datumo’, a solution that helps process and analyze artificial intelligence big data, ▴‘VESSL AI’, the provider of a solution to eliminate the overhead** of machine learning systems; and ▴ ‘DolbomDream’, which developed an inflatable vest that helps the psychological stability of people with developmental disabilities.
* XR (eXtended Reality): Ultra-realistic technology that enhances immersion by utilizing augmented reality, virtual reality, and mixed reality technologies
** Overhead: Additional time required for stable processing of the program
In addition, two companies (Plasmapp and NotaAI) that are participating in the D-Unicorn program with the support of the Daejeon City and two companies (Enget and ILIAS Biologics) that are receiving support from the Scale Up Tips of the Ministry of SMEs and Startups, three companies (WiPowerOne, IDK Lab, and Artificial Photosynthesis Lab) that are continuing to realize the sustainable development goals for a total of 14 KAIST startups, will hold a corporate information session with about 100 invited guests from global companies and venture capital.
< Photo 4. Presentation for AP Lab >
Prior to this event, participating startups will be visiting the New York Economic Development Corporation and large law firms to receive advice on U.S. government support programs and on their attemps to enter the U.S. market. In addition, the participating companies plan to visit a startup support investment institution pursuing sustainable development goals and the Leslie eLab, New York University's one-stop startup support space, to lay the foundation for KAIST's leap forward in global technology commercialization.
< Photo 5. Sung-Yool Choi, the Director of KAIST Institute of Technology Value Creation (left) at the 2023 KAIST Tech Fair in New York with the key participants >
Sung-Yool Choi, the Director of KAIST Institute of Technology Value Creation, said, “KAIST prepared this event to realize its vision of being a leading university in creating global value.” He added, “We hope that our startups founded with KAIST technology would successfully completed market verification to be successful in securing global demands and in attracting investments for their endeavors.”
2023.09.11 View 18228
KAIST holds its first ‘KAIST Tech Fair’ in New York, USA
< Photo 1. 2023 KAIST Tech Fair in New York >
KAIST (President Kwang-Hyung Lee) announced on the 11th that it will hold the ‘2023 KAIST Tech Fair in New York’ at the Kimmel Center at New York University in Manhattan, USA, on the 22nd of this month. It is an event designed to be the starting point for KAIST to expand its startup ecosystem into the global stage, and it is to attract investments and secure global customers in New York by demonstrating the technological value of KAIST startup companies directly at location.
< Photo 2. President Kwang Hyung Lee at the 2023 KAIST Tech Fair in New York >
KAIST has been holding briefing sessions for technology transfer in Korea every year since 2018, and this year is the first time to hold a tech fair overseas for global companies.
KAIST Institute of Technology Value Creation (Director Sung-Yool Choi) has prepared for this event over the past six months with the Korea International Trade Association (hereinafter KITA, CEO Christopher Koo) to survey customer base and investment companies to conduct market analysis.
Among the companies founded with the technologies developed by the faculty and students of KAIST and their partners, 7 companies were selected to be matched with companies overseas that expressed interests in these technologies. Global multinational companies in the fields of IT, artificial intelligence, environment, logistics, distribution, and retail are participating as demand agencies and are testing the marketability of the start-up's technology as of September.
Daim Research, founded by Professor Young Jae Jang of the Department of Industrial and Systems Engineering, is a company specializing in smart factory automation solutions and is knocking on the door of the global market with a platform technology optimized for automated logistics systems.
< Photo 3. Presentation by Professor Young Jae Jang for DAIM Research >
It is a ‘collaborative intelligence’ solution that maximizes work productivity by having a number of robots used in industrial settings collaborate with one another. The strength of their solution is that logistics robots equipped with AI reinforced learning technology can respond to processes and environmental changes on their own, minimizing maintenance costs and the system can achieve excellent performance even with a small amount of data when it is combined with the digital twin technology the company has developed on its own.
A student startup, ‘Aniai’, is entering the US market, the home of hamburgers, with hamburger patty automation equipments and solutions. This is a robot kitchen startup founded by its CEO Gunpil Hwang, a graduate of KAIST’s School of Electrical Engineering which gathered together the experts in the fields of robot control, design, and artificial intelligence and cognitive technology to develop technology to automatically cook hamburger patties.
At the touch of a button, both sides of the patty are cooked simultaneously for consistent taste and quality according to the set condition. Since it can cook about 200 dishes in an hour, it is attracting attention as a technology that can not only solve manpower shortages but also accelerate the digital transformation of the restaurant industry.
Also, at the tech fair to be held at the Kimmel Center of New York University on the 22nd, the following startups who are currently under market verification in the U.S. will be participating: ▴'TheWaveTalk', which developed a water quality management system that can measure external substances and metal ions by transferring original technology from KAIST; ▴‘VIRNECT’, which helps workers improve their skills by remotely managing industrial sites using XR*; ▴‘Datumo’, a solution that helps process and analyze artificial intelligence big data, ▴‘VESSL AI’, the provider of a solution to eliminate the overhead** of machine learning systems; and ▴ ‘DolbomDream’, which developed an inflatable vest that helps the psychological stability of people with developmental disabilities.
* XR (eXtended Reality): Ultra-realistic technology that enhances immersion by utilizing augmented reality, virtual reality, and mixed reality technologies
** Overhead: Additional time required for stable processing of the program
In addition, two companies (Plasmapp and NotaAI) that are participating in the D-Unicorn program with the support of the Daejeon City and two companies (Enget and ILIAS Biologics) that are receiving support from the Scale Up Tips of the Ministry of SMEs and Startups, three companies (WiPowerOne, IDK Lab, and Artificial Photosynthesis Lab) that are continuing to realize the sustainable development goals for a total of 14 KAIST startups, will hold a corporate information session with about 100 invited guests from global companies and venture capital.
< Photo 4. Presentation for AP Lab >
Prior to this event, participating startups will be visiting the New York Economic Development Corporation and large law firms to receive advice on U.S. government support programs and on their attemps to enter the U.S. market. In addition, the participating companies plan to visit a startup support investment institution pursuing sustainable development goals and the Leslie eLab, New York University's one-stop startup support space, to lay the foundation for KAIST's leap forward in global technology commercialization.
< Photo 5. Sung-Yool Choi, the Director of KAIST Institute of Technology Value Creation (left) at the 2023 KAIST Tech Fair in New York with the key participants >
Sung-Yool Choi, the Director of KAIST Institute of Technology Value Creation, said, “KAIST prepared this event to realize its vision of being a leading university in creating global value.” He added, “We hope that our startups founded with KAIST technology would successfully completed market verification to be successful in securing global demands and in attracting investments for their endeavors.”
2023.09.11 View 18228 -
 KAIST Research Team Develops World’s First Humanoid Pilot, PIBOT
In the Spring of last year, the legendary, fictional pilot “Maverick” flew his plane in the film “Top Gun: Maverick” that drew crowds to theatres around the world. This year, the appearance of a humanoid pilot, PIBOT, has stolen the spotlight at KAIST.
< Photo 1. Humanoid pilot robot, PIBOT >
A KAIST research team has developed a humanoid robot that can understand manuals written in natural language and fly a plane on its own. The team also announced their plans to commercialize the humanoid pilot.
< Photo 2. PIBOT on flight simulator (view from above) >
The project was led by KAIST Professor David Hyunchul Shim, and was conducted as a joint research project with Professors Jaegul Choo, Kuk-Jin Yoon, and Min Jun Kim. The study was supported by Future Challenge Funding under the project title, “Development of Human-like Pilot Robot based on Natural Language Processing”. The team utilized AI and robotics technologies, and demonstrated that the humanoid could sit itself in a real cockpit and operate the various pieces of equipment without modifying any part of the aircraft. This is a fundamental difference that distinguishes this technology from existing autopilot functions or unmanned aircrafts.
< Photo 3. PIBOT operating a flight simulator (side) >
The KAIST team’s humanoid pilot is still under development but it can already remember Jeppeson charts from all around the world, which is impossible for human pilots to do, and fly without error. In particular, it can make use of recent ChatGPT technology to remember the full Quick Reference Handbook (QRF) and respond immediately to various situations, as well as calculate safe routes in real time based on the flight status of the aircraft, with emergency response times quicker than human pilots.
Furthermore, while existing robots usually carry out repeated motions in a fixed position, PIBOT can analyze the state of the cockpit as well as the situation outside the aircraft using an embedded camera. PIBOT can accurately control the various switches in the cockpit and, using high-precision control technology, it can accurately control its robotic arms and hands even during harsh turbulence.
< Photo 4. PIBOT on-board KLA-100, Korea’s first light aircraft >
The humanoid pilot is currently capable of carrying out all operations from starting the aircraft to taxiing, takeoff and landing, cruising, and cycling using a flight control simulator. The research team plans to use the humanoid pilot to fly a real-life light aircraft to verify its abilities. Prof. Shim explained, “Humanoid pilot robots do not require the modification of existing aircrafts and can be applied immediately to automated flights. They are therefore highly applicable and practical. We expect them to be applied into various other vehicles like cars and military trucks since they can control a wide range of equipment. They will particularly be particularly helpful in situations where military resources are severely depleted.”
This research was supported by Future Challenge Funding (total: 5.7 bn KRW) from the Agency for Defense Development. The project started in 2022 as a joint research project by Prof. David Hyunchul Shim (chief of research) from the KAIST School of Electrical Engineering (EE), Prof. Jaegul Choo from the Kim Jaechul Graduate School of AI at KAIST, Prof. Kuk-Jin Yoon from the KAIST Department of Mechanical Engineering, and Prof. Min Jun Kim from the KAIST School of EE. The project is to be completed by 2026 and the involved researchers are also considering commercialization strategies for both military and civil use.
2023.08.03 View 15432
KAIST Research Team Develops World’s First Humanoid Pilot, PIBOT
In the Spring of last year, the legendary, fictional pilot “Maverick” flew his plane in the film “Top Gun: Maverick” that drew crowds to theatres around the world. This year, the appearance of a humanoid pilot, PIBOT, has stolen the spotlight at KAIST.
< Photo 1. Humanoid pilot robot, PIBOT >
A KAIST research team has developed a humanoid robot that can understand manuals written in natural language and fly a plane on its own. The team also announced their plans to commercialize the humanoid pilot.
< Photo 2. PIBOT on flight simulator (view from above) >
The project was led by KAIST Professor David Hyunchul Shim, and was conducted as a joint research project with Professors Jaegul Choo, Kuk-Jin Yoon, and Min Jun Kim. The study was supported by Future Challenge Funding under the project title, “Development of Human-like Pilot Robot based on Natural Language Processing”. The team utilized AI and robotics technologies, and demonstrated that the humanoid could sit itself in a real cockpit and operate the various pieces of equipment without modifying any part of the aircraft. This is a fundamental difference that distinguishes this technology from existing autopilot functions or unmanned aircrafts.
< Photo 3. PIBOT operating a flight simulator (side) >
The KAIST team’s humanoid pilot is still under development but it can already remember Jeppeson charts from all around the world, which is impossible for human pilots to do, and fly without error. In particular, it can make use of recent ChatGPT technology to remember the full Quick Reference Handbook (QRF) and respond immediately to various situations, as well as calculate safe routes in real time based on the flight status of the aircraft, with emergency response times quicker than human pilots.
Furthermore, while existing robots usually carry out repeated motions in a fixed position, PIBOT can analyze the state of the cockpit as well as the situation outside the aircraft using an embedded camera. PIBOT can accurately control the various switches in the cockpit and, using high-precision control technology, it can accurately control its robotic arms and hands even during harsh turbulence.
< Photo 4. PIBOT on-board KLA-100, Korea’s first light aircraft >
The humanoid pilot is currently capable of carrying out all operations from starting the aircraft to taxiing, takeoff and landing, cruising, and cycling using a flight control simulator. The research team plans to use the humanoid pilot to fly a real-life light aircraft to verify its abilities. Prof. Shim explained, “Humanoid pilot robots do not require the modification of existing aircrafts and can be applied immediately to automated flights. They are therefore highly applicable and practical. We expect them to be applied into various other vehicles like cars and military trucks since they can control a wide range of equipment. They will particularly be particularly helpful in situations where military resources are severely depleted.”
This research was supported by Future Challenge Funding (total: 5.7 bn KRW) from the Agency for Defense Development. The project started in 2022 as a joint research project by Prof. David Hyunchul Shim (chief of research) from the KAIST School of Electrical Engineering (EE), Prof. Jaegul Choo from the Kim Jaechul Graduate School of AI at KAIST, Prof. Kuk-Jin Yoon from the KAIST Department of Mechanical Engineering, and Prof. Min Jun Kim from the KAIST School of EE. The project is to be completed by 2026 and the involved researchers are also considering commercialization strategies for both military and civil use.
2023.08.03 View 15432 -
 Professor Joseph J. Lim of KAIST receives the Best System Paper Award from RSS 2023, First in Korea
- Professor Joseph J. Lim from the Kim Jaechul Graduate School of AI at KAIST and his team receive an award for the most outstanding paper in the implementation of robot systems.
- Professor Lim works on AI-based perception, reasoning, and sequential decision-making to develop systems capable of intelligent decision-making, including robot learning
< Photo 1. RSS2023 Best System Paper Award Presentation >
The team of Professor Joseph J. Lim from the Kim Jaechul Graduate School of AI at KAIST has been honored with the 'Best System Paper Award' at "Robotics: Science and Systems (RSS) 2023".
The RSS conference is globally recognized as a leading event for showcasing the latest discoveries and advancements in the field of robotics. It is a venue where the greatest minds in robotics engineering and robot learning come together to share their research breakthroughs. The RSS Best System Paper Award is a prestigious honor granted to a paper that excels in presenting real-world robot system implementation and experimental results.
< Photo 2. Professor Joseph J. Lim of Kim Jaechul Graduate School of AI at KAIST >
The team led by Professor Lim, including two Master's students and an alumnus (soon to be appointed at Yonsei University), received the prestigious RSS Best System Paper Award, making it the first-ever achievement for a Korean and for a domestic institution.
< Photo 3. Certificate of the Best System Paper Award presented at RSS 2023 >
This award is especially meaningful considering the broader challenges in the field. Although recent progress in artificial intelligence and deep learning algorithms has resulted in numerous breakthroughs in robotics, most of these achievements have been confined to relatively simple and short tasks, like walking or pick-and-place. Moreover, tasks are typically performed in simulated environments rather than dealing with more complex, long-horizon real-world tasks such as factory operations or household chores. These limitations primarily stem from the considerable challenge of acquiring data required to develop and validate learning-based AI techniques, particularly in real-world complex tasks.
In light of these challenges, this paper introduced a benchmark that employs 3D printing to simplify the reproduction of furniture assembly tasks in real-world environments. Furthermore, it proposed a standard benchmark for the development and comparison of algorithms for complex and long-horizon tasks, supported by teleoperation data. Ultimately, the paper suggests a new research direction of addressing complex and long-horizon tasks and encourages diverse advancements in research by facilitating reproducible experiments in real-world environments.
Professor Lim underscored the growing potential for integrating robots into daily life, driven by an aging population and an increase in single-person households. As robots become part of everyday life, testing their performance in real-world scenarios becomes increasingly crucial. He hoped this research would serve as a cornerstone for future studies in this field.
The Master's students, Minho Heo and Doohyun Lee, from the Kim Jaechul Graduate School of AI at KAIST, also shared their aspirations to become global researchers in the domain of robot learning. Meanwhile, the alumnus of Professor Lim's research lab, Dr. Youngwoon Lee, is set to be appointed to the Graduate School of AI at Yonsei University and will continue pursuing research in robot learning.
Paper title: Furniture Bench: Reproducible Real-World Benchmark for Long-Horizon Complex Manipulation. Robotics: Science and Systems.
< Image. Conceptual Summary of the 3D Printing Technology >
2023.07.31 View 10590
Professor Joseph J. Lim of KAIST receives the Best System Paper Award from RSS 2023, First in Korea
- Professor Joseph J. Lim from the Kim Jaechul Graduate School of AI at KAIST and his team receive an award for the most outstanding paper in the implementation of robot systems.
- Professor Lim works on AI-based perception, reasoning, and sequential decision-making to develop systems capable of intelligent decision-making, including robot learning
< Photo 1. RSS2023 Best System Paper Award Presentation >
The team of Professor Joseph J. Lim from the Kim Jaechul Graduate School of AI at KAIST has been honored with the 'Best System Paper Award' at "Robotics: Science and Systems (RSS) 2023".
The RSS conference is globally recognized as a leading event for showcasing the latest discoveries and advancements in the field of robotics. It is a venue where the greatest minds in robotics engineering and robot learning come together to share their research breakthroughs. The RSS Best System Paper Award is a prestigious honor granted to a paper that excels in presenting real-world robot system implementation and experimental results.
< Photo 2. Professor Joseph J. Lim of Kim Jaechul Graduate School of AI at KAIST >
The team led by Professor Lim, including two Master's students and an alumnus (soon to be appointed at Yonsei University), received the prestigious RSS Best System Paper Award, making it the first-ever achievement for a Korean and for a domestic institution.
< Photo 3. Certificate of the Best System Paper Award presented at RSS 2023 >
This award is especially meaningful considering the broader challenges in the field. Although recent progress in artificial intelligence and deep learning algorithms has resulted in numerous breakthroughs in robotics, most of these achievements have been confined to relatively simple and short tasks, like walking or pick-and-place. Moreover, tasks are typically performed in simulated environments rather than dealing with more complex, long-horizon real-world tasks such as factory operations or household chores. These limitations primarily stem from the considerable challenge of acquiring data required to develop and validate learning-based AI techniques, particularly in real-world complex tasks.
In light of these challenges, this paper introduced a benchmark that employs 3D printing to simplify the reproduction of furniture assembly tasks in real-world environments. Furthermore, it proposed a standard benchmark for the development and comparison of algorithms for complex and long-horizon tasks, supported by teleoperation data. Ultimately, the paper suggests a new research direction of addressing complex and long-horizon tasks and encourages diverse advancements in research by facilitating reproducible experiments in real-world environments.
Professor Lim underscored the growing potential for integrating robots into daily life, driven by an aging population and an increase in single-person households. As robots become part of everyday life, testing their performance in real-world scenarios becomes increasingly crucial. He hoped this research would serve as a cornerstone for future studies in this field.
The Master's students, Minho Heo and Doohyun Lee, from the Kim Jaechul Graduate School of AI at KAIST, also shared their aspirations to become global researchers in the domain of robot learning. Meanwhile, the alumnus of Professor Lim's research lab, Dr. Youngwoon Lee, is set to be appointed to the Graduate School of AI at Yonsei University and will continue pursuing research in robot learning.
Paper title: Furniture Bench: Reproducible Real-World Benchmark for Long-Horizon Complex Manipulation. Robotics: Science and Systems.
< Image. Conceptual Summary of the 3D Printing Technology >
2023.07.31 View 10590