-
 세상에 없던 아이디어, KAIST가 현실로, 자석으로 양자컴퓨팅 기술 구현
세상에 없는 기술을 제안하라는 KAIST 글로벌 특이점 연구사업으로 시작된 ‘자석으로 양자컴퓨팅 기술을 개발한다’는 아이디어가 현실로 실현되었다. KAIST와 국제공동 연구진은 ‘자기 성질을 가진 물질(자성체)’을 활용해 양자컴퓨팅의 핵심 기술을 세계 최초로 실증하는데 성공했다.
우리 대학 물리학과 김갑진 교수 연구팀이 미국 아르곤 국립 연구소(Argonne National Lab.), 일리노이대 어바나-샴페인(Univ. of Illinois Urbana-Champaign, UIUC)와 공동연구를 통해, ‘광자-마그논 하이브리드 칩’을 개발해 자성체에서 다중 펄스 간섭 현상을 실시간으로 구현하는 데 세계 최초로 성공했다.
쉽게 설명하면, 연구팀은 ‘빛’과 ‘자석 내부의 진동(마그논)’이 함께 작동하는 특수한 칩을 개발하여 멀리 떨어진 자석 사이에서 신호(위상 정보)를 전송하고, 여러 개의 신호가 서로 간섭하는 현상을 실시간으로 관측하고 조절하는 데 성공한 것이다.
이는 자석이 양자 연산의 핵심 부품으로 활용될 수 있다는 것을 보여준 세계 최초의 실험으로, 자성체 기반 양자컴퓨팅 플랫폼 개발의 중요한 전환점이 될 것으로 기대된다.
자석의 N극과 S극은 원자 내부에 존재하는 전자의 스핀(spin)에서 나오게 되는데, 여러 원자가 모였을 때 나타나는 스핀들의 집단적인 진동 상태를 마그논(magnon)이라고 한다.
마그논은 특히, 정보를 한쪽으로만 전달하는 비상호성(nonreciprocity) 특성을 가질 수 있어, 양자 노이즈 차단을 통한 소형 양자 칩 개발에 응용될 수 있고, 광 및 마이크로파와 동시에 결합할 수 있어 양자 정보를 수십 km 거리로 전송하는 양자 통신 소자로도 응용이 가능하다.
또한, 특수한 자석 물질인 반강자성체(antiferromagnet)를 이용하면 양자컴퓨터의 작동 주파수를 훨씬 빠른 속도, THz(테라헤르츠) 대역으로 높여서 현재 양자컴퓨터 하드웨어 한계를 뛰어넘는, 복잡한 냉각 장비 없이도 상온에서 작동하는 양자컴퓨터의 개발이 가능할 수 있다.
그러나, 마그논을 기반으로 한 양자컴퓨팅과 통신 시스템 전반의 구현에 필요한 이 모든 기술을 실현하기 위해서는 마그논 위상 정보, 즉 마그논의 파동이 언제부터 시작되고 움직이는지에 대한 정보를 실시간으로 전송 및 측정하고, 그것을 제어하는 기술이 필수적이었다.
김갑진 교수 연구팀은 작은 자석 구슬인 이트륨 철 가넷(Yttrium Iron Garnet, YIG) 2개를 12 mm 간격으로 배치하고, 그 사이에 구글, IBM 등의 양자컴퓨터에서 사용되는 회로인 초전도 공진기를 설치하여 한쪽 자석에 신호(펄스)를 넣어서 다른 자석까지 정보가 잘 전달되는지를 측정하였다.
그 결과, 수 나노초(ns) 길이의 아주 짧은 하나의 펄스부터 최대 네 개의 마이크로파 펄스를 입력하였을 때 그로 인해 생기는 자석 내부의 진동(마그논)이 초전도 회로를 통해 멀리 있는 다른 자석까지 손실 없이 전달되는 것을 확인하였고, 여러 펄스 사이에 간섭을 일으켰을 때 각각의 위상 정보를 유지하며 신호가 예측대로 보강 또는 상쇄되는 것(결맞음 간섭 현상)을 실시간 도메인에서 관측하는 데 성공했다.
나아가 연구팀은 여러 펄스(신호)의 주파수와 이들 간의 시간 간격을 조절하여 자석 안에 생기는 마그논의 간섭 패턴을 임의로 제어할 수 있음을 입증함으로써, 전기 신호 입력을 통해 마그논의 양자 상태(위상 정보)를 자유롭게 제어할 가능성을 처음으로 입증하였다.
이번 연구는 양자 정보 처리 분야에서 필수적인 여러 개의 신호(다중 펄스)를 활용한 양자 게이트 연산이 자성체-초전도 회로 하이브리드 시스템*에서도 구현될 수 있음을 보여주었다. 이 결과는 자성체 기반 양자 소자가 실질적으로 양자컴퓨팅에 활용될 수 있는 가능성을 열어준다는 점에서 중요한 의미를 가진다.
* 자성체-초전도 회로 하이브리드 시스템: 자성체의 마그논과 초전도 회로를 결합해, 서로의 장점을 살린 새로운 양자 연산 시스템
김갑진 교수는“이번 연구는‘세상에 없는 기술을 제안하라’는 KAIST 글로벌 특이점 연구사업에‘자석으로 양자컴퓨터를 개발할 수 있을까?’라는 다소 엉뚱하지만 모험적인 아이디어를 제안하며 시작되었다”며
“그 여정 자체가 매우 흥미로웠으며, 특히 이번 연구 결과는 양자 스핀트로닉스(quantum spintronics)라는 새로운 연구 분야의 가능성을 열었을 뿐만 아니라, 고효율 양자정보 처리 장치 개발을 위한 중요한 전환점이 될 것으로 기대된다”라고 말했다.
물리학과 송무준 박사후연구원이 제1 저자로 참여하고 미국 아르곤 국립 연구소(Argonne National Laboratory)의 이 리(Yi Li) 박사, 발렌틴 노보사드(Valentine Novosad) 박사, 일리노이 주립대학교(University of Illinois Urbana-Champaign, UIUC)의 악셀 호프만(Axel Hoffmann) 교수 연구팀이 참여한 이번 연구는 네이처 출판 그룹이 출간하는 국제 학술지 ‘엔피제이 스핀트로닉스(npj spintronics)’와 `네이처 커뮤니케이션즈(Nature Communications)'에 4월 1일, 4월 17일에 연이어 출판되었다.
※ 논문명 1: Single-shot magnon interference in a magnon-superconducting-resonator hybrid circuit, Nat. Commun. 16, 3649 (2025), DOI: https://doi.org/10.1038/s41467-025-58482-2
※ 논문명 2: Single-shot electrical detection of short-wavelength magnon pulse transmission in a magnonic ultra-thin-film waveguide, npj Spintronics 3, 12 (2025),
DOI: https://doi.org/10.1038/s44306-025-00072-5
이번 연구는 KAIST 글로벌특이점연구사업과 과학기술정보통신부 한국연구재단 중견연구, 선도연구센터, 양자정보과학인적기반 조성사업 및 미국 에너지부의 지원을 받아 수행됐다.
세상에 없던 아이디어, KAIST가 현실로, 자석으로 양자컴퓨팅 기술 구현
세상에 없는 기술을 제안하라는 KAIST 글로벌 특이점 연구사업으로 시작된 ‘자석으로 양자컴퓨팅 기술을 개발한다’는 아이디어가 현실로 실현되었다. KAIST와 국제공동 연구진은 ‘자기 성질을 가진 물질(자성체)’을 활용해 양자컴퓨팅의 핵심 기술을 세계 최초로 실증하는데 성공했다.
우리 대학 물리학과 김갑진 교수 연구팀이 미국 아르곤 국립 연구소(Argonne National Lab.), 일리노이대 어바나-샴페인(Univ. of Illinois Urbana-Champaign, UIUC)와 공동연구를 통해, ‘광자-마그논 하이브리드 칩’을 개발해 자성체에서 다중 펄스 간섭 현상을 실시간으로 구현하는 데 세계 최초로 성공했다.
쉽게 설명하면, 연구팀은 ‘빛’과 ‘자석 내부의 진동(마그논)’이 함께 작동하는 특수한 칩을 개발하여 멀리 떨어진 자석 사이에서 신호(위상 정보)를 전송하고, 여러 개의 신호가 서로 간섭하는 현상을 실시간으로 관측하고 조절하는 데 성공한 것이다.
이는 자석이 양자 연산의 핵심 부품으로 활용될 수 있다는 것을 보여준 세계 최초의 실험으로, 자성체 기반 양자컴퓨팅 플랫폼 개발의 중요한 전환점이 될 것으로 기대된다.
자석의 N극과 S극은 원자 내부에 존재하는 전자의 스핀(spin)에서 나오게 되는데, 여러 원자가 모였을 때 나타나는 스핀들의 집단적인 진동 상태를 마그논(magnon)이라고 한다.
마그논은 특히, 정보를 한쪽으로만 전달하는 비상호성(nonreciprocity) 특성을 가질 수 있어, 양자 노이즈 차단을 통한 소형 양자 칩 개발에 응용될 수 있고, 광 및 마이크로파와 동시에 결합할 수 있어 양자 정보를 수십 km 거리로 전송하는 양자 통신 소자로도 응용이 가능하다.
또한, 특수한 자석 물질인 반강자성체(antiferromagnet)를 이용하면 양자컴퓨터의 작동 주파수를 훨씬 빠른 속도, THz(테라헤르츠) 대역으로 높여서 현재 양자컴퓨터 하드웨어 한계를 뛰어넘는, 복잡한 냉각 장비 없이도 상온에서 작동하는 양자컴퓨터의 개발이 가능할 수 있다.
그러나, 마그논을 기반으로 한 양자컴퓨팅과 통신 시스템 전반의 구현에 필요한 이 모든 기술을 실현하기 위해서는 마그논 위상 정보, 즉 마그논의 파동이 언제부터 시작되고 움직이는지에 대한 정보를 실시간으로 전송 및 측정하고, 그것을 제어하는 기술이 필수적이었다.
김갑진 교수 연구팀은 작은 자석 구슬인 이트륨 철 가넷(Yttrium Iron Garnet, YIG) 2개를 12 mm 간격으로 배치하고, 그 사이에 구글, IBM 등의 양자컴퓨터에서 사용되는 회로인 초전도 공진기를 설치하여 한쪽 자석에 신호(펄스)를 넣어서 다른 자석까지 정보가 잘 전달되는지를 측정하였다.
그 결과, 수 나노초(ns) 길이의 아주 짧은 하나의 펄스부터 최대 네 개의 마이크로파 펄스를 입력하였을 때 그로 인해 생기는 자석 내부의 진동(마그논)이 초전도 회로를 통해 멀리 있는 다른 자석까지 손실 없이 전달되는 것을 확인하였고, 여러 펄스 사이에 간섭을 일으켰을 때 각각의 위상 정보를 유지하며 신호가 예측대로 보강 또는 상쇄되는 것(결맞음 간섭 현상)을 실시간 도메인에서 관측하는 데 성공했다.
나아가 연구팀은 여러 펄스(신호)의 주파수와 이들 간의 시간 간격을 조절하여 자석 안에 생기는 마그논의 간섭 패턴을 임의로 제어할 수 있음을 입증함으로써, 전기 신호 입력을 통해 마그논의 양자 상태(위상 정보)를 자유롭게 제어할 가능성을 처음으로 입증하였다.
이번 연구는 양자 정보 처리 분야에서 필수적인 여러 개의 신호(다중 펄스)를 활용한 양자 게이트 연산이 자성체-초전도 회로 하이브리드 시스템*에서도 구현될 수 있음을 보여주었다. 이 결과는 자성체 기반 양자 소자가 실질적으로 양자컴퓨팅에 활용될 수 있는 가능성을 열어준다는 점에서 중요한 의미를 가진다.
* 자성체-초전도 회로 하이브리드 시스템: 자성체의 마그논과 초전도 회로를 결합해, 서로의 장점을 살린 새로운 양자 연산 시스템
김갑진 교수는“이번 연구는‘세상에 없는 기술을 제안하라’는 KAIST 글로벌 특이점 연구사업에‘자석으로 양자컴퓨터를 개발할 수 있을까?’라는 다소 엉뚱하지만 모험적인 아이디어를 제안하며 시작되었다”며
“그 여정 자체가 매우 흥미로웠으며, 특히 이번 연구 결과는 양자 스핀트로닉스(quantum spintronics)라는 새로운 연구 분야의 가능성을 열었을 뿐만 아니라, 고효율 양자정보 처리 장치 개발을 위한 중요한 전환점이 될 것으로 기대된다”라고 말했다.
물리학과 송무준 박사후연구원이 제1 저자로 참여하고 미국 아르곤 국립 연구소(Argonne National Laboratory)의 이 리(Yi Li) 박사, 발렌틴 노보사드(Valentine Novosad) 박사, 일리노이 주립대학교(University of Illinois Urbana-Champaign, UIUC)의 악셀 호프만(Axel Hoffmann) 교수 연구팀이 참여한 이번 연구는 네이처 출판 그룹이 출간하는 국제 학술지 ‘엔피제이 스핀트로닉스(npj spintronics)’와 `네이처 커뮤니케이션즈(Nature Communications)'에 4월 1일, 4월 17일에 연이어 출판되었다.
※ 논문명 1: Single-shot magnon interference in a magnon-superconducting-resonator hybrid circuit, Nat. Commun. 16, 3649 (2025), DOI: https://doi.org/10.1038/s41467-025-58482-2
※ 논문명 2: Single-shot electrical detection of short-wavelength magnon pulse transmission in a magnonic ultra-thin-film waveguide, npj Spintronics 3, 12 (2025),
DOI: https://doi.org/10.1038/s44306-025-00072-5
이번 연구는 KAIST 글로벌특이점연구사업과 과학기술정보통신부 한국연구재단 중견연구, 선도연구센터, 양자정보과학인적기반 조성사업 및 미국 에너지부의 지원을 받아 수행됐다.
2025.05.07
조회수 709
-
 세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
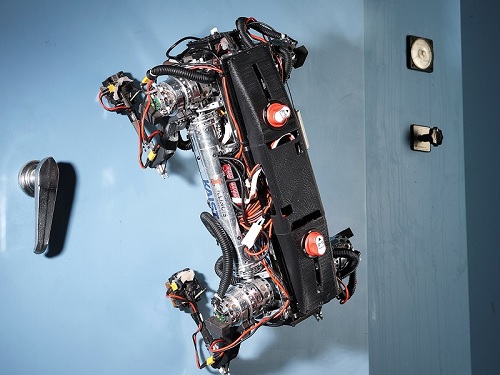
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
2022.12.26
조회수 9781
-
 신 개념 두더지 게임로봇 개발
- 이우훈 교수 연구팀, 프랑스에서 열린 세계적 가상현실 및 증강현실 전시회인 ‘라발 버추얼’에서 최고작품상 수상 -
KAIST 연구팀이 만든 신 개념 게임로봇이 세계적인 가상현실 전시회에 국내 작품으론 첫 출품됐음에도 불구하고 대상격인 최고작품상까지 차지, 수상자 명단에 이름을 올려 화제가 되고 있다.
우리 학교 산업디자인학과 이우훈 교수팀이 지난 3월 28일부터 4월 1일까지 프랑스 라발에서 열린 세계적 가상현실 및 증강현실 전시회인 라발 버추얼(Laval Virtual)에서 일명 두더지 게임로봇인 ‘몰봇(MoleBot)’을 출품해 최고작품상을 수상했다.
몰봇은 기존의 컴퓨터 게임과 같은 가상현실 방식과는 다르게 순전히 물리적인 환경에서도 즐길 수 있는 신 개념 게임로봇으로, 인간과 가상세계가 상호작용할 수 있다는 점에서 전시회기간 내내 관람객들로부터 많은 주목을 받았다.
‘몰봇’ 테이블은 약 15,000개의 작은 정육각형 핀들로 구성돼 있는데, 테이블 속에 있는 물체가 움직이면 육각 핀이 미끄러지듯 오르내려 마치 내부에 두더지가 돌아다니는 것처럼 보인다.
특히, 조이스틱을 이용해 조종할 수 있고 테이블 위 물체와 물리적 상호작용을 통해 축구나 미로게임 등 다양한 게임을 즐길 수 있는 게 이 작품의 특징이다.이와 함께, ‘몰봇’은 제스처로도 조종이 가능한데 연구팀은 사람의 손동작을 인식할 수 있도록 ‘몰봇’ 위에 키넥트(Kinect)를 설치했기 때문에 마치 애완동물을 가지고 노는 듯한 게임도 가능하다.
이 교수팀은 ‘테이블 속에 두더지가 산다면...’이라는 다소 황당한 발상을 통해 이 게임로봇을 구상했다.
연구팀은 우선 15,000여개의 육각 핀을 배열해 변형될 수 있는 테이블을 만든 다음, 유선형의 플라스틱 몰드를 핀 아래에 배치하고 그 사이에는 스판덱스(Spandex)라는 고탄력 섬유를 적용해 마찰을 줄임으로써 내부에 두더지가 살아 움직이는 것과 같은 유연한 움직임을 구현하는데 성공했다.
몰드 안에는 자석을 삽입해 내부의 기계적인 움직임을 몰드에 잘 전달될 수 있도록 설계했다. 이후 많은 노력을 거쳐 연구를 시작한지 약 2년 만에 ‘몰봇’을 세상에 선보일 수 있었다.
이우훈 교수는 “가상현실 및 증강현실이라는 공학 분야의 전시회에서 디자인팀이 최고상을 수상하는 것은 극히 이례적인 일”이라며 “작품의 기술적 창의성과 예술적 완성도가 조화를 이뤄 좋은 결과를 낸 것 같다”고 수상소감을 밝혔다.
이 교수는 또 “이번 작품은 테이블 위에 상호작용 가능한 세계를 구축하는 새로운 게임 인터페이스가 될 수 있다”며 “그 동안 디자인의 관점에서 공학과 예술을 접목하려고 노력해왔는데 앞으로 몰봇을 게임은 물론 인간-컴퓨터 상호작용, 건축, 인테리어, 의료 등 다양한 분야에 응용할 계획”이라고 덧붙였다.
올해로 14회 째를 맞은 라발 버추얼은 매년 1만명 이상 참가하는 세계적인 권위를 지닌 전시회로 가상현실과 증강현실분야에서 최첨단 신기술을 선보이는 학회로서도 유명하다.
모두 12개 분야에서 각각 한 작품씩 선정해 상을 주는데 이 교수팀 작품은 분야를 통틀어 이 대회 최고작품상을 수상했다.
관련영상 http://vimeo.com/24155036
그림1. 몰봇
그림2. 몰봇의 내부구조
그림3. 올해 프랑스에서 열린 라발 버추얼에서 어린이들이 몰봇을 가지고 게임하는 모습
신 개념 두더지 게임로봇 개발
- 이우훈 교수 연구팀, 프랑스에서 열린 세계적 가상현실 및 증강현실 전시회인 ‘라발 버추얼’에서 최고작품상 수상 -
KAIST 연구팀이 만든 신 개념 게임로봇이 세계적인 가상현실 전시회에 국내 작품으론 첫 출품됐음에도 불구하고 대상격인 최고작품상까지 차지, 수상자 명단에 이름을 올려 화제가 되고 있다.
우리 학교 산업디자인학과 이우훈 교수팀이 지난 3월 28일부터 4월 1일까지 프랑스 라발에서 열린 세계적 가상현실 및 증강현실 전시회인 라발 버추얼(Laval Virtual)에서 일명 두더지 게임로봇인 ‘몰봇(MoleBot)’을 출품해 최고작품상을 수상했다.
몰봇은 기존의 컴퓨터 게임과 같은 가상현실 방식과는 다르게 순전히 물리적인 환경에서도 즐길 수 있는 신 개념 게임로봇으로, 인간과 가상세계가 상호작용할 수 있다는 점에서 전시회기간 내내 관람객들로부터 많은 주목을 받았다.
‘몰봇’ 테이블은 약 15,000개의 작은 정육각형 핀들로 구성돼 있는데, 테이블 속에 있는 물체가 움직이면 육각 핀이 미끄러지듯 오르내려 마치 내부에 두더지가 돌아다니는 것처럼 보인다.
특히, 조이스틱을 이용해 조종할 수 있고 테이블 위 물체와 물리적 상호작용을 통해 축구나 미로게임 등 다양한 게임을 즐길 수 있는 게 이 작품의 특징이다.이와 함께, ‘몰봇’은 제스처로도 조종이 가능한데 연구팀은 사람의 손동작을 인식할 수 있도록 ‘몰봇’ 위에 키넥트(Kinect)를 설치했기 때문에 마치 애완동물을 가지고 노는 듯한 게임도 가능하다.
이 교수팀은 ‘테이블 속에 두더지가 산다면...’이라는 다소 황당한 발상을 통해 이 게임로봇을 구상했다.
연구팀은 우선 15,000여개의 육각 핀을 배열해 변형될 수 있는 테이블을 만든 다음, 유선형의 플라스틱 몰드를 핀 아래에 배치하고 그 사이에는 스판덱스(Spandex)라는 고탄력 섬유를 적용해 마찰을 줄임으로써 내부에 두더지가 살아 움직이는 것과 같은 유연한 움직임을 구현하는데 성공했다.
몰드 안에는 자석을 삽입해 내부의 기계적인 움직임을 몰드에 잘 전달될 수 있도록 설계했다. 이후 많은 노력을 거쳐 연구를 시작한지 약 2년 만에 ‘몰봇’을 세상에 선보일 수 있었다.
이우훈 교수는 “가상현실 및 증강현실이라는 공학 분야의 전시회에서 디자인팀이 최고상을 수상하는 것은 극히 이례적인 일”이라며 “작품의 기술적 창의성과 예술적 완성도가 조화를 이뤄 좋은 결과를 낸 것 같다”고 수상소감을 밝혔다.
이 교수는 또 “이번 작품은 테이블 위에 상호작용 가능한 세계를 구축하는 새로운 게임 인터페이스가 될 수 있다”며 “그 동안 디자인의 관점에서 공학과 예술을 접목하려고 노력해왔는데 앞으로 몰봇을 게임은 물론 인간-컴퓨터 상호작용, 건축, 인테리어, 의료 등 다양한 분야에 응용할 계획”이라고 덧붙였다.
올해로 14회 째를 맞은 라발 버추얼은 매년 1만명 이상 참가하는 세계적인 권위를 지닌 전시회로 가상현실과 증강현실분야에서 최첨단 신기술을 선보이는 학회로서도 유명하다.
모두 12개 분야에서 각각 한 작품씩 선정해 상을 주는데 이 교수팀 작품은 분야를 통틀어 이 대회 최고작품상을 수상했다.
관련영상 http://vimeo.com/24155036
그림1. 몰봇
그림2. 몰봇의 내부구조
그림3. 올해 프랑스에서 열린 라발 버추얼에서 어린이들이 몰봇을 가지고 게임하는 모습
2012.04.17
조회수 15624