ES
-
 KAIST Researchers Suggest an Extraordinary Alternative to Petroleum-based PET - Bacteria!
< (From left) Dr. Cindy Pricilia, Ph.D. Candidate Cheon Woo Moon, Distinguished Professor Sang Yup Lee >
Currently, the world is suffering from environmental problems caused by plastic waste. The KAIST research team has succeeded in producing a microbial-based plastic that is biodegradable and can replace existing PET bottles, making it a hot topic.
Our university announced on the 7th of November that the research team of Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering has succeeded in developing a microbial strain that efficiently produces pseudoaromatic polyester monomer to replace polyethylene terephthalate (PET) using systems metabolic engineering.
Pseudoaromatic dicarboxylic acids have better physical properties and higher biodegradability than aromatic polyester (PET) when synthesized as polymers, and are attracting attention as an eco-friendly monomer* that can be synthesized into polymers. The production of pseudoaromatic dicarboxylic acids through chemical methods has the problems of low yield and selectivity, complex reaction conditions, and the generation of hazardous waste.
*Monomer: A material for making polymers, which is used to synthesize polymers by polymerizing monomers together
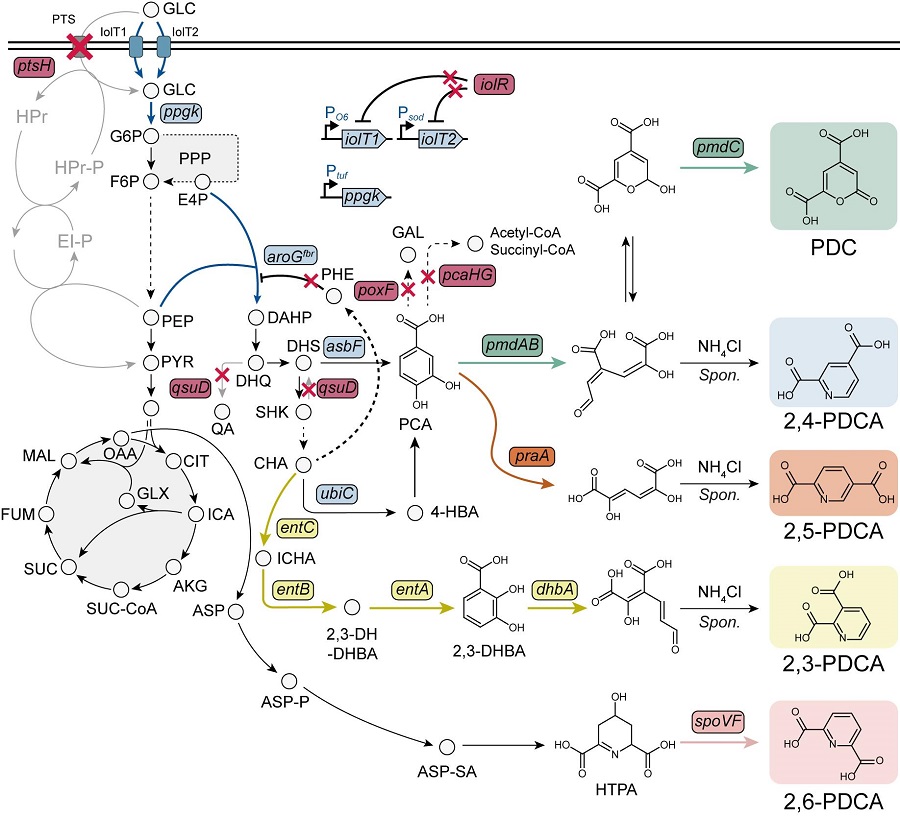
< Figure. Overview of pseudoaromatic dicarboxylic acid production using metabolically engineered C. glutamicum. >
To solve this problem, Professor Sang Yup Lee's research team used metabolic engineering to develop a microbial strain that efficiently produces five types of pseudoaromatic dicarboxylic acids, including 2-pyrone-4,6-dicarboxylic acid and four types of pyridine dicarboxylic acids (2,3-, 2,4-, 2,5-, 2,6-pyridine dicarboxylic acids), in Corynebacterium, a bacterium mainly used for amino acid production.
The research team used metabolic engineering techniques to build a platform microbial strain that enhances the metabolic flow of protocatechuic acid, which is used as a precursor for several pseudoaromatic dicarboxylic acids, and prevents the loss of precursors.
Based on this, the genetic manipulation target was discovered through transcriptome analysis, producing 76.17 g/L of 2-pyrone-4,6-dicarboxylic acid, and by newly discovering and constructing three types of pyridine dicarboxylic acid production metabolic pathways, successfully producing 2.79 g/L of 2,3-pyridine dicarboxylic acid, 0.49 g/L of 2,4-pyridine dicarboxylic acid, and 1.42 g/L of 2,5-pyridine dicarboxylic acid.
In addition, the research team confirmed the production of 15.01 g/L through the construction and reinforcement of the 2,6-pyridine dicarboxylic acid biosynthesis pathway, successfully producing a total of five similar aromatic dicarboxylic acids with high efficiency.
In conclusion, the team succeeded in producing 2,4-, 2,5-, and 2,6-pyridine dicarboxylic acids at the world's highest concentration. In particular, 2,4-, 2,5-pyridine dicarboxylic acid achieved production on the scale of g/L, which was previously produced in extremely small amounts (mg/L).
Based on this study, it is expected that it will be applied to various polyester production industrial processes, and it is also expected that it will be actively utilized in research on the production of similar aromatic polyesters.
Professor Sang Yup Lee, the corresponding author, said, “The significance lies in the fact that we have developed an eco-friendly technology that efficiently produces similar aromatic polyester monomers based on microorganisms,” and “This study will help the microorganism-based bio-monomer industry replace the petrochemical-based chemical industry in the future.”
The results of this study were published in the international academic journal, the Proceedings of the National Academy of Sciences of United States of America (PNAS) on October 30th.
※ Paper title: Metabolic engineering of Corynebacterium glutamicum for the production of pyrone and pyridine dicarboxylic acids
※ Author information: Jae Sung Cho (co-first author), Zi Wei Luo (co-first author), Cheon Woo Moon (co-first author), Cindy Prabowo (co-author), Sang Yup Lee (corresponding author) - a total of 5 people
This study was conducted with the support of the Development of Next-generation Biorefinery Platform Technologies for Leading Bio-based Chemicals Industry Project and the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project (Project leader: Professor Sang Yup Lee) from the National Research Foundation supported by the Ministry of Science and Technology and ICT of Korea.
2024.11.08 View 11039
KAIST Researchers Suggest an Extraordinary Alternative to Petroleum-based PET - Bacteria!
< (From left) Dr. Cindy Pricilia, Ph.D. Candidate Cheon Woo Moon, Distinguished Professor Sang Yup Lee >
Currently, the world is suffering from environmental problems caused by plastic waste. The KAIST research team has succeeded in producing a microbial-based plastic that is biodegradable and can replace existing PET bottles, making it a hot topic.
Our university announced on the 7th of November that the research team of Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering has succeeded in developing a microbial strain that efficiently produces pseudoaromatic polyester monomer to replace polyethylene terephthalate (PET) using systems metabolic engineering.
Pseudoaromatic dicarboxylic acids have better physical properties and higher biodegradability than aromatic polyester (PET) when synthesized as polymers, and are attracting attention as an eco-friendly monomer* that can be synthesized into polymers. The production of pseudoaromatic dicarboxylic acids through chemical methods has the problems of low yield and selectivity, complex reaction conditions, and the generation of hazardous waste.
*Monomer: A material for making polymers, which is used to synthesize polymers by polymerizing monomers together
< Figure. Overview of pseudoaromatic dicarboxylic acid production using metabolically engineered C. glutamicum. >
To solve this problem, Professor Sang Yup Lee's research team used metabolic engineering to develop a microbial strain that efficiently produces five types of pseudoaromatic dicarboxylic acids, including 2-pyrone-4,6-dicarboxylic acid and four types of pyridine dicarboxylic acids (2,3-, 2,4-, 2,5-, 2,6-pyridine dicarboxylic acids), in Corynebacterium, a bacterium mainly used for amino acid production.
The research team used metabolic engineering techniques to build a platform microbial strain that enhances the metabolic flow of protocatechuic acid, which is used as a precursor for several pseudoaromatic dicarboxylic acids, and prevents the loss of precursors.
Based on this, the genetic manipulation target was discovered through transcriptome analysis, producing 76.17 g/L of 2-pyrone-4,6-dicarboxylic acid, and by newly discovering and constructing three types of pyridine dicarboxylic acid production metabolic pathways, successfully producing 2.79 g/L of 2,3-pyridine dicarboxylic acid, 0.49 g/L of 2,4-pyridine dicarboxylic acid, and 1.42 g/L of 2,5-pyridine dicarboxylic acid.
In addition, the research team confirmed the production of 15.01 g/L through the construction and reinforcement of the 2,6-pyridine dicarboxylic acid biosynthesis pathway, successfully producing a total of five similar aromatic dicarboxylic acids with high efficiency.
In conclusion, the team succeeded in producing 2,4-, 2,5-, and 2,6-pyridine dicarboxylic acids at the world's highest concentration. In particular, 2,4-, 2,5-pyridine dicarboxylic acid achieved production on the scale of g/L, which was previously produced in extremely small amounts (mg/L).
Based on this study, it is expected that it will be applied to various polyester production industrial processes, and it is also expected that it will be actively utilized in research on the production of similar aromatic polyesters.
Professor Sang Yup Lee, the corresponding author, said, “The significance lies in the fact that we have developed an eco-friendly technology that efficiently produces similar aromatic polyester monomers based on microorganisms,” and “This study will help the microorganism-based bio-monomer industry replace the petrochemical-based chemical industry in the future.”
The results of this study were published in the international academic journal, the Proceedings of the National Academy of Sciences of United States of America (PNAS) on October 30th.
※ Paper title: Metabolic engineering of Corynebacterium glutamicum for the production of pyrone and pyridine dicarboxylic acids
※ Author information: Jae Sung Cho (co-first author), Zi Wei Luo (co-first author), Cheon Woo Moon (co-first author), Cindy Prabowo (co-author), Sang Yup Lee (corresponding author) - a total of 5 people
This study was conducted with the support of the Development of Next-generation Biorefinery Platform Technologies for Leading Bio-based Chemicals Industry Project and the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project (Project leader: Professor Sang Yup Lee) from the National Research Foundation supported by the Ministry of Science and Technology and ICT of Korea.
2024.11.08 View 11039 -
 KAIST Proposes AI Training Method that will Drastically Shorten Time for Complex Quantum Mechanical Calculations
- Professor Yong-Hoon Kim's team from the School of Electrical Engineering succeeded for the first time in accelerating quantum mechanical electronic structure calculations using a convolutional neural network (CNN) model
- Presenting an AI learning principle of quantum mechanical 3D chemical bonding information, the work is expected to accelerate the computer-assisted designing of next-generation materials and devices
The close relationship between AI and high-performance scientific computing can be seen in the fact that both the 2024 Nobel Prizes in Physics and Chemistry were awarded to scientists for their AI-related research contributions in their respective fields of study. KAIST researchers succeeded in dramatically reducing the computation time for highly sophisticated quantum mechanical computer simulations by predicting atomic-level chemical bonding information distributed in 3D space using a novel AI approach.
KAIST (President Kwang-Hyung Lee) announced on the 30th of October that Professor Yong-Hoon Kim's team from the School of Electrical Engineering developed a 3D computer vision artificial neural network-based computation methodology that bypasses the complex algorithms required for atomic-level quantum mechanical calculations traditionally performed using supercomputers to derive the properties of materials.
< Figure 1. Various methodologies are utilized in the simulation of materials and materials, such as quantum mechanical calculations at the nanometer (nm) level, classical mechanical force fields at the scale of tens to hundreds of nanometers, continuum dynamics calculations at the macroscopic scale, and calculations that mix simulations at different scales. These simulations are already playing a key role in a wide range of basic research and application development fields in combination with informatics techniques. Recently, there have been active efforts to introduce machine learning techniques to radically accelerate simulations, but research on introducing machine learning techniques to quantum mechanical electronic structure calculations, which form the basis of high-scale simulations, is still insufficient. >
The quantum mechanical density functional theory (DFT) calculations using supercomputers have become an essential and standard tool in a wide range of research and development fields, including advanced materials and drug design, as they allow fast and accurate prediction of material properties.
*Density functional theory (DFT): A representative theory of ab initio (first principles) calculations that calculate quantum mechanical properties from the atomic level.
However, practical DFT calculations require generating 3D electron density and solving quantum mechanical equations through a complex, iterative self-consistent field (SCF)* process that must be repeated tens to hundreds of times. This restricts its application to systems with only a few hundred to a few thousand atoms.
*Self-consistent field (SCF): A scientific computing method widely used to solve complex many-body problems that must be described by a number of interconnected simultaneous differential equations.
Professor Yong-Hoon Kim’s research team questioned whether recent advancements in AI techniques could be used to bypass the SCF process. As a result, they developed the DeepSCF model, which accelerates calculations by learning chemical bonding information distributed in a 3D space using neural network algorithms from the field of computer vision.
< Figure 2. The deepSCF methodology developed in this study provides a way to rapidly accelerate DFT calculations by avoiding the self-consistent field process (orange box) that had to be performed repeatedly in traditional quantum mechanical electronic structure calculations through artificial neural network techniques (green box). The self-consistent field process is a process of predicting the 3D electron density, constructing the corresponding potential, and then solving the quantum mechanical Cohn-Sham equations, repeating tens to hundreds of times. The core idea of the deepSCF methodology is that the residual electron density (δρ), which is the difference between the electron density (ρ) and the sum of the electron densities of the constituent atoms (ρ0), corresponds to chemical bonding information, so the self-consistent field process is replaced with a 3D convolutional neural network model. >
The research team focused on the fact that, according to density functional theory, electron density contains all quantum mechanical information of electrons, and that the residual electron density — the difference between the total electron density and the sum of the electron densities of the constituent atoms — contains chemical bonding information. They used this as the target for machine learning.
They then adopted a dataset of organic molecules with various chemical bonding characteristics, and applied random rotations and deformations to the atomic structures of these molecules to further enhance the model’s accuracy and generalization capabilities. Ultimately, the research team demonstrated the validity and efficiency of the DeepSCF methodology on large, complex systems.
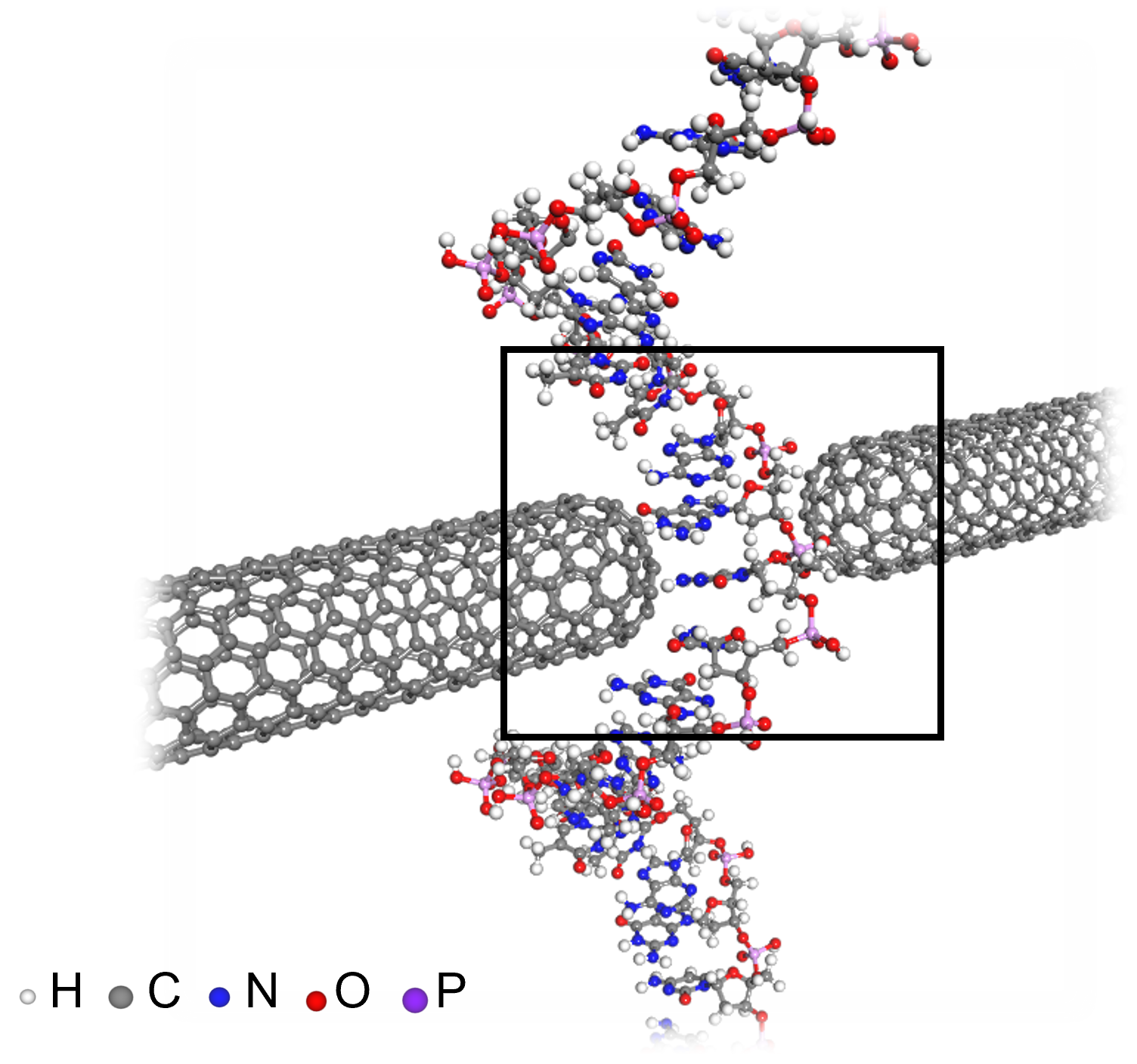
< Figure 3. An example of applying the deepSCF methodology to a carbon nanotube-based DNA sequence analysis device model (top left). In addition to classical mechanical interatomic forces (bottom right), the residual electron density (top right) and quantum mechanical electronic structure properties such as the electronic density of states (DOS) (bottom left) containing information on chemical bonding are rapidly predicted with an accuracy corresponding to the standard DFT calculation results that perform the SCF process. >
Professor Yong-Hoon Kim, who supervised the research, explained that his team had found a way to map quantum mechanical chemical bonding information in a 3D space onto artificial neural networks. He noted, “Since quantum mechanical electron structure calculations underpin materials simulations across all scales, this research establishes a foundational principle for accelerating material calculations using artificial intelligence.”
Ryong-Gyu Lee, a PhD candidate in the School of Electrical Engineering, served as the first author of this research, which was published online on October 24 in Npj Computational Materials, a prestigious journal in the field of material computation. (Paper title: “Convolutional network learning of self-consistent electron density via grid-projected atomic fingerprints”)
This research was conducted with support from the KAIST High-Risk Research Program for Graduate Students and the National Research Foundation of Korea’s Mid-career Researcher Support Program.
2024.10.30 View 7609
KAIST Proposes AI Training Method that will Drastically Shorten Time for Complex Quantum Mechanical Calculations
- Professor Yong-Hoon Kim's team from the School of Electrical Engineering succeeded for the first time in accelerating quantum mechanical electronic structure calculations using a convolutional neural network (CNN) model
- Presenting an AI learning principle of quantum mechanical 3D chemical bonding information, the work is expected to accelerate the computer-assisted designing of next-generation materials and devices
The close relationship between AI and high-performance scientific computing can be seen in the fact that both the 2024 Nobel Prizes in Physics and Chemistry were awarded to scientists for their AI-related research contributions in their respective fields of study. KAIST researchers succeeded in dramatically reducing the computation time for highly sophisticated quantum mechanical computer simulations by predicting atomic-level chemical bonding information distributed in 3D space using a novel AI approach.
KAIST (President Kwang-Hyung Lee) announced on the 30th of October that Professor Yong-Hoon Kim's team from the School of Electrical Engineering developed a 3D computer vision artificial neural network-based computation methodology that bypasses the complex algorithms required for atomic-level quantum mechanical calculations traditionally performed using supercomputers to derive the properties of materials.
< Figure 1. Various methodologies are utilized in the simulation of materials and materials, such as quantum mechanical calculations at the nanometer (nm) level, classical mechanical force fields at the scale of tens to hundreds of nanometers, continuum dynamics calculations at the macroscopic scale, and calculations that mix simulations at different scales. These simulations are already playing a key role in a wide range of basic research and application development fields in combination with informatics techniques. Recently, there have been active efforts to introduce machine learning techniques to radically accelerate simulations, but research on introducing machine learning techniques to quantum mechanical electronic structure calculations, which form the basis of high-scale simulations, is still insufficient. >
The quantum mechanical density functional theory (DFT) calculations using supercomputers have become an essential and standard tool in a wide range of research and development fields, including advanced materials and drug design, as they allow fast and accurate prediction of material properties.
*Density functional theory (DFT): A representative theory of ab initio (first principles) calculations that calculate quantum mechanical properties from the atomic level.
However, practical DFT calculations require generating 3D electron density and solving quantum mechanical equations through a complex, iterative self-consistent field (SCF)* process that must be repeated tens to hundreds of times. This restricts its application to systems with only a few hundred to a few thousand atoms.
*Self-consistent field (SCF): A scientific computing method widely used to solve complex many-body problems that must be described by a number of interconnected simultaneous differential equations.
Professor Yong-Hoon Kim’s research team questioned whether recent advancements in AI techniques could be used to bypass the SCF process. As a result, they developed the DeepSCF model, which accelerates calculations by learning chemical bonding information distributed in a 3D space using neural network algorithms from the field of computer vision.
< Figure 2. The deepSCF methodology developed in this study provides a way to rapidly accelerate DFT calculations by avoiding the self-consistent field process (orange box) that had to be performed repeatedly in traditional quantum mechanical electronic structure calculations through artificial neural network techniques (green box). The self-consistent field process is a process of predicting the 3D electron density, constructing the corresponding potential, and then solving the quantum mechanical Cohn-Sham equations, repeating tens to hundreds of times. The core idea of the deepSCF methodology is that the residual electron density (δρ), which is the difference between the electron density (ρ) and the sum of the electron densities of the constituent atoms (ρ0), corresponds to chemical bonding information, so the self-consistent field process is replaced with a 3D convolutional neural network model. >
The research team focused on the fact that, according to density functional theory, electron density contains all quantum mechanical information of electrons, and that the residual electron density — the difference between the total electron density and the sum of the electron densities of the constituent atoms — contains chemical bonding information. They used this as the target for machine learning.
They then adopted a dataset of organic molecules with various chemical bonding characteristics, and applied random rotations and deformations to the atomic structures of these molecules to further enhance the model’s accuracy and generalization capabilities. Ultimately, the research team demonstrated the validity and efficiency of the DeepSCF methodology on large, complex systems.
< Figure 3. An example of applying the deepSCF methodology to a carbon nanotube-based DNA sequence analysis device model (top left). In addition to classical mechanical interatomic forces (bottom right), the residual electron density (top right) and quantum mechanical electronic structure properties such as the electronic density of states (DOS) (bottom left) containing information on chemical bonding are rapidly predicted with an accuracy corresponding to the standard DFT calculation results that perform the SCF process. >
Professor Yong-Hoon Kim, who supervised the research, explained that his team had found a way to map quantum mechanical chemical bonding information in a 3D space onto artificial neural networks. He noted, “Since quantum mechanical electron structure calculations underpin materials simulations across all scales, this research establishes a foundational principle for accelerating material calculations using artificial intelligence.”
Ryong-Gyu Lee, a PhD candidate in the School of Electrical Engineering, served as the first author of this research, which was published online on October 24 in Npj Computational Materials, a prestigious journal in the field of material computation. (Paper title: “Convolutional network learning of self-consistent electron density via grid-projected atomic fingerprints”)
This research was conducted with support from the KAIST High-Risk Research Program for Graduate Students and the National Research Foundation of Korea’s Mid-career Researcher Support Program.
2024.10.30 View 7609 -
 A KAIST Team Develops Face-Conforming LED Mask Showing 340% Improved Efficacy in Deep Skin Elasticity
- A KAIST research team led by Professor Keon Jae Lee has developed a deep skin-stimulating LED mask which has been verified in clinical trials to improve dermis elasticity by 340%.
< Figure 1. Overall concept of face-fit surface-lighting micro-LEDs (FSLED) mask. a. Optical image of the FSLED mask showing uniform surface-lighting. schematic illustration of the FSLED mask. The 2D to 3D transformation procedure b. Difference in cosmetic effect on deep skin elasticity, wrinkles, and sagging between FSLED mask and CLED mask. (improvement percentage in eight weeks) >
Conventional LED masks, with their rigid design, fail to conform closely to the skin's contours. This limitation causes substantial light reflection, with up to 90% reflected over a distance of 2 cm, reducing light penetration and limiting stimulation of the deep skin layers essential for effective skin rejuvenation.
To address these challenges, Professor Lee's team developed a face-conforming surface lighting micro-LED (FSLED) mask, which can provide uniform photostimulation to the dermis. The key technology lies in the mask's ability to deliver uniform light to deep skin tissues while maintaining a conformal skin attachment. This is achieved through a 3D origami structure, integrated with 3,770 micro-LEDs and flexible surface light-diffusion layer, minimizing the gaps between the light source and the skin.
In clinical trials involving 33 participants, the FSLED mask demonstrated a 340% improvement in deep skin elasticity compared to conventional LED masks, proving its efficacy in significantly reducing skin wrinkles, sagging and aging.
Professor Keon Jae Lee said, “The FSLED mask provides cosmetic benefits to the entire facial dermis without the side effects of low-temperature burns, making home-care anti-aging treatment that enhances the quality of human life possible. The product is being manufactured by Fronics, KAIST startup company, and will be distributed globally through Amorepacific's network, with sales starting in November.”
This result titled “Clinical Validation of Face-fit Surface-lighting Micro Light-emitting Diode Mask for Skin Anti-aging Treatment”, in which Min Seo Kim, a student of the Master-Doctorate integrated program, and Jaehun An, a Ph.D. candidate, in the Department of Materials Science and Engineering of KAIST, took part as co-first authors, was published in Advanced Materials on October 22nd, 2024 (DOI: 10.1002/adma.202411651).
Introductory Video: Face-conforming surface LED mask for skin anti-aging ( https://www.youtube.com/watch?v=kSccLwx8N_w )
2024.10.29 View 9297
A KAIST Team Develops Face-Conforming LED Mask Showing 340% Improved Efficacy in Deep Skin Elasticity
- A KAIST research team led by Professor Keon Jae Lee has developed a deep skin-stimulating LED mask which has been verified in clinical trials to improve dermis elasticity by 340%.
< Figure 1. Overall concept of face-fit surface-lighting micro-LEDs (FSLED) mask. a. Optical image of the FSLED mask showing uniform surface-lighting. schematic illustration of the FSLED mask. The 2D to 3D transformation procedure b. Difference in cosmetic effect on deep skin elasticity, wrinkles, and sagging between FSLED mask and CLED mask. (improvement percentage in eight weeks) >
Conventional LED masks, with their rigid design, fail to conform closely to the skin's contours. This limitation causes substantial light reflection, with up to 90% reflected over a distance of 2 cm, reducing light penetration and limiting stimulation of the deep skin layers essential for effective skin rejuvenation.
To address these challenges, Professor Lee's team developed a face-conforming surface lighting micro-LED (FSLED) mask, which can provide uniform photostimulation to the dermis. The key technology lies in the mask's ability to deliver uniform light to deep skin tissues while maintaining a conformal skin attachment. This is achieved through a 3D origami structure, integrated with 3,770 micro-LEDs and flexible surface light-diffusion layer, minimizing the gaps between the light source and the skin.
In clinical trials involving 33 participants, the FSLED mask demonstrated a 340% improvement in deep skin elasticity compared to conventional LED masks, proving its efficacy in significantly reducing skin wrinkles, sagging and aging.
Professor Keon Jae Lee said, “The FSLED mask provides cosmetic benefits to the entire facial dermis without the side effects of low-temperature burns, making home-care anti-aging treatment that enhances the quality of human life possible. The product is being manufactured by Fronics, KAIST startup company, and will be distributed globally through Amorepacific's network, with sales starting in November.”
This result titled “Clinical Validation of Face-fit Surface-lighting Micro Light-emitting Diode Mask for Skin Anti-aging Treatment”, in which Min Seo Kim, a student of the Master-Doctorate integrated program, and Jaehun An, a Ph.D. candidate, in the Department of Materials Science and Engineering of KAIST, took part as co-first authors, was published in Advanced Materials on October 22nd, 2024 (DOI: 10.1002/adma.202411651).
Introductory Video: Face-conforming surface LED mask for skin anti-aging ( https://www.youtube.com/watch?v=kSccLwx8N_w )
2024.10.29 View 9297 -
 KAIST Professor Uichin Lee Receives Distinguished Paper Award from ACM
< Photo. Professor Uichin Lee (left) receiving the award >
KAIST (President Kwang Hyung Lee) announced on the 25th of October that Professor Uichin Lee’s research team from the School of Computing received the Distinguished Paper Award at the International Joint Conference on Pervasive and Ubiquitous Computing and International Symposium on Wearable Computing (Ubicomp / ISWC) hosted by the Association for Computing Machinery (ACM) in Melbourne, Australia on October 8.
The ACM Ubiquitous Computing Conference is the most prestigious international conference where leading universities and global companies from around the world present the latest research results on ubiquitous computing and wearable technologies in the field of human-computer interaction (HCI).
The main conference program is composed of invited papers published in the Proceedings of the ACM (PACM) on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), which covers the latest research in the field of ubiquitous and wearable computing.
The Distinguished Paper Award Selection Committee selected eight papers among 205 papers published in Vol. 7 of the ACM Proceedings (PACM IMWUT) that made outstanding and exemplary contributions to the research community. The committee consists of 16 prominent experts who are current and former members of the journal's editorial board which made the selection after a rigorous review of all papers for a period that stretched over a month.
< Figure 1. BeActive mobile app to promote physical activity to form active lifestyle habits >
The research that won the Distinguished Paper Award was conducted by Dr. Junyoung Park, a graduate of the KAIST Graduate School of Data Science, as the 1st author, and was titled “Understanding Disengagement in Just-in-Time Mobile Health Interventions”
Professor Uichin Lee’s research team explored user engagement of ‘Just-in-Time Mobile Health Interventions’ that actively provide interventions in opportune situations by utilizing sensor data collected from health management apps, based on the premise that these apps are aptly in use to ensure effectiveness.
< Figure 2. Traditional user-requested digital behavior change intervention (DBCI) delivery (Pull) vs. Automatic transmission (Push) for Just-in-Time (JIT) mobile DBCI using smartphone sensing technologies >
The research team conducted a systematic analysis of user disengagement or the decline in user engagement in digital behavior change interventions. They developed the BeActive system, an app that promotes physical activities designed to help forming active lifestyle habits, and systematically analyzed the effects of users’ self-control ability and boredom-proneness on compliance with behavioral interventions over time.
The results of an 8-week field trial revealed that even if just-in-time interventions are provided according to the user’s situation, it is impossible to avoid a decline in participation. However, for users with high self-control and low boredom tendency, the compliance with just-in-time interventions delivered through the app was significantly higher than that of users in other groups.
In particular, users with high boredom proneness easily got tired of the repeated push interventions, and their compliance with the app decreased more quickly than in other groups.
< Figure 3. Just-in-time Mobile Health Intervention: a demonstrative case of the BeActive system: When a user is identified to be sitting for more than 50 mins, an automatic push notification is sent to recommend a short active break to complete for reward points. >
Professor Uichin Lee explained, “As the first study on user engagement in digital therapeutics and wellness services utilizing mobile just-in-time health interventions, this research provides a foundation for exploring ways to empower user engagement.” He further added, “By leveraging large language models (LLMs) and comprehensive context-aware technologies, it will be possible to develop user-centered AI technologies that can significantly boost engagement."
< Figure 4. A conceptual illustration of user engagement in digital health apps. Engagement in digital health apps consists of (1) engagement in using digital health apps and (2) engagement in behavioral interventions provided by digital health apps, i.e., compliance with behavioral interventions. Repeated adherences to behavioral interventions recommended by digital health apps can help achieve the distal health goals. >
This study was conducted with the support of the 2021 Biomedical Technology Development Program and the 2022 Basic Research and Development Program of the National Research Foundation of Korea funded by the Ministry of Science and ICT.
< Figure 5. A conceptual illustration of user disengagement and engagement of digital behavior change intervention (DBCI) apps. In general, user engagement of digital health intervention apps consists of two components: engagement in digital health apps and engagement in behavioral interventions recommended by such apps (known as behavioral compliance or intervention adherence). The distinctive stages of user can be divided into adoption, abandonment, and attrition. >
< Figure 6. Trends of changes in frequency of app usage and adherence to behavioral intervention over 8 weeks, ● SC: Self-Control Ability (High-SC: user group with high self-control, Low-SC: user group with low self-control) ● BD: Boredom-Proneness (High-BD: user group with high boredom-proneness, Low-BD: user group with low boredom-proneness). The app usage frequencies were declined over time, but the adherence rates of those participants with High-SC and Low-BD were significantly higher than other groups. >
2024.10.25 View 10108
KAIST Professor Uichin Lee Receives Distinguished Paper Award from ACM
< Photo. Professor Uichin Lee (left) receiving the award >
KAIST (President Kwang Hyung Lee) announced on the 25th of October that Professor Uichin Lee’s research team from the School of Computing received the Distinguished Paper Award at the International Joint Conference on Pervasive and Ubiquitous Computing and International Symposium on Wearable Computing (Ubicomp / ISWC) hosted by the Association for Computing Machinery (ACM) in Melbourne, Australia on October 8.
The ACM Ubiquitous Computing Conference is the most prestigious international conference where leading universities and global companies from around the world present the latest research results on ubiquitous computing and wearable technologies in the field of human-computer interaction (HCI).
The main conference program is composed of invited papers published in the Proceedings of the ACM (PACM) on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), which covers the latest research in the field of ubiquitous and wearable computing.
The Distinguished Paper Award Selection Committee selected eight papers among 205 papers published in Vol. 7 of the ACM Proceedings (PACM IMWUT) that made outstanding and exemplary contributions to the research community. The committee consists of 16 prominent experts who are current and former members of the journal's editorial board which made the selection after a rigorous review of all papers for a period that stretched over a month.
< Figure 1. BeActive mobile app to promote physical activity to form active lifestyle habits >
The research that won the Distinguished Paper Award was conducted by Dr. Junyoung Park, a graduate of the KAIST Graduate School of Data Science, as the 1st author, and was titled “Understanding Disengagement in Just-in-Time Mobile Health Interventions”
Professor Uichin Lee’s research team explored user engagement of ‘Just-in-Time Mobile Health Interventions’ that actively provide interventions in opportune situations by utilizing sensor data collected from health management apps, based on the premise that these apps are aptly in use to ensure effectiveness.
< Figure 2. Traditional user-requested digital behavior change intervention (DBCI) delivery (Pull) vs. Automatic transmission (Push) for Just-in-Time (JIT) mobile DBCI using smartphone sensing technologies >
The research team conducted a systematic analysis of user disengagement or the decline in user engagement in digital behavior change interventions. They developed the BeActive system, an app that promotes physical activities designed to help forming active lifestyle habits, and systematically analyzed the effects of users’ self-control ability and boredom-proneness on compliance with behavioral interventions over time.
The results of an 8-week field trial revealed that even if just-in-time interventions are provided according to the user’s situation, it is impossible to avoid a decline in participation. However, for users with high self-control and low boredom tendency, the compliance with just-in-time interventions delivered through the app was significantly higher than that of users in other groups.
In particular, users with high boredom proneness easily got tired of the repeated push interventions, and their compliance with the app decreased more quickly than in other groups.
< Figure 3. Just-in-time Mobile Health Intervention: a demonstrative case of the BeActive system: When a user is identified to be sitting for more than 50 mins, an automatic push notification is sent to recommend a short active break to complete for reward points. >
Professor Uichin Lee explained, “As the first study on user engagement in digital therapeutics and wellness services utilizing mobile just-in-time health interventions, this research provides a foundation for exploring ways to empower user engagement.” He further added, “By leveraging large language models (LLMs) and comprehensive context-aware technologies, it will be possible to develop user-centered AI technologies that can significantly boost engagement."
< Figure 4. A conceptual illustration of user engagement in digital health apps. Engagement in digital health apps consists of (1) engagement in using digital health apps and (2) engagement in behavioral interventions provided by digital health apps, i.e., compliance with behavioral interventions. Repeated adherences to behavioral interventions recommended by digital health apps can help achieve the distal health goals. >
This study was conducted with the support of the 2021 Biomedical Technology Development Program and the 2022 Basic Research and Development Program of the National Research Foundation of Korea funded by the Ministry of Science and ICT.
< Figure 5. A conceptual illustration of user disengagement and engagement of digital behavior change intervention (DBCI) apps. In general, user engagement of digital health intervention apps consists of two components: engagement in digital health apps and engagement in behavioral interventions recommended by such apps (known as behavioral compliance or intervention adherence). The distinctive stages of user can be divided into adoption, abandonment, and attrition. >
< Figure 6. Trends of changes in frequency of app usage and adherence to behavioral intervention over 8 weeks, ● SC: Self-Control Ability (High-SC: user group with high self-control, Low-SC: user group with low self-control) ● BD: Boredom-Proneness (High-BD: user group with high boredom-proneness, Low-BD: user group with low boredom-proneness). The app usage frequencies were declined over time, but the adherence rates of those participants with High-SC and Low-BD were significantly higher than other groups. >
2024.10.25 View 10108 -
 KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 14738
KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 14738 -
 KAIST Develops Thread-like, Flexible Thermoelectric Materials Applicable in Extreme Environments
A team of Korean researchers developed a thermoelectric material that can be used in wearable devices, such as smart clothing, and while maintaining stable thermal energy performance even in extreme environments. It has dramatically resolved the dilemma of striking the balance between achieving good performance and the mechanical flexibility of thermoelectric materials, which has been a long-standing challenge in the field of thermoelectric materials, and has also proven the possibility of commercialization.
KAIST (President Kwang-Hyung Lee) announced on the 21st that a joint research team of Professor Yeon Sik Jung of the Department of Materials Science and Engineering and Professor Inkyu Park of the Department of Mechanical Engineering, in collaboration with the research teams of Professor Min-Wook Oh of Hanbat National University (President Yong Jun Oh) and Dr. Jun-Ho Jeong of the Korea Institute of Machinery and Materials (President Seoghyun Ryu), have successfully developed ‘bismuth telluride (Bi2Te3) thermoelectric fibers,’ an innovative energy harvesting solution for next-generation flexible electronic devices.
Thermoelectric materials are materials that generate voltage when there is a temperature difference and convert thermal energy into electrical energy. Currently, about 70% of energy being lost as wasted heat, so due attention is being given to research on these as sustainable energy materials that can recover and harvesting energy from this waste heat.
Most of the heat sources around us are curved, such as the human body, vehicle exhaust pipes, and cooling fins. Inorganic thermoelectric materials based on ceramic materials boast high thermoelectric performance, but they are fragile and difficult to produce in curved shapes. On the other hand, flexible thermoelectric materials using existing polymer binders can be applied to surfaces of various shapes, but their performance was limited due to the low electrical conductivity and high thermal resistance of the polymer.
Existing flexible thermoelectric materials contain polymer additives, but the inorganic thermoelectric material developed by the research team is not flexible, so they overcame these limitations by twisting nano ribbons instead of additives to produce a thread-shaped thermoelectric material. Inspired by the flexibility of inorganic nano ribbons, the research team used a nanomold-based electron beam deposition technique to continuously deposit nano ribbons and then twisted them into a thread shape to create bismuth telluride (Bi2Te3) inorganic thermoelectric fibers.
These inorganic thermoelectric fibers have higher bending strength than existing thermoelectric materials, and showed almost no change in electrical properties even after repeated bending and tensile tests of more than 1,000 times. The thermoelectric device created by the research team generates electricity using temperature differences, and if clothes are made with fiber-type thermoelectric devices, electricity can be generated from body temperature to operate other electronic devices.
< Figure 1. Schematic diagram and actual image of the all-inorganic flexible thermoelectric yarn made without polymer additives >
In fact, the possibility of commercialization was proven through a demonstration of collecting energy by embedding thermoelectric fibers in life jackets or clothing. In addition, it opened up the possibility of building a high-efficiency energy harvesting system that recycles waste heat by utilizing the temperature difference between the hot fluid inside a pipe and the cold air outside in industrial settings.
Professor Yeon Sik Jung said, "The inorganic flexible thermoelectric material developed in this study can be used in wearable devices such as smart clothing, and it can maintain stable performance even in extreme environments, so it has a high possibility of being commercialized through additional research in the future." Professor Inkyu Park also emphasized, "This technology will become the core of next-generation energy harvesting technology, and it is expected to play an important role in various fields from waste heat utilization in industrial sites to personal wearable self-power generation devices."
This study, in which Hanhwi Jang, a Ph.D. student at KAIST's Department of Materials Science and Engineering, Professor Junseong Ahn of Korea University, Sejong Campus, and Dr. Yongrok Jeong of Korea Atomic Energy Research Institute contributed equally as joint first authors, was published in the online edition of the international academic journal Advanced Materials on September 17, and was selected as the back-cover paper in recognition of its excellence. (Paper title: Flexible All-Inorganic Thermoelectric Yarns)
Meanwhile, this study was conducted through the Mid-career Researcher Support Program and the Future Materials Discovery Program of the National Research Foundation of Korea, and the support from the Global Bio-Integrated Materials Center, the Ministry of Trade, Industry and Energy, and the Korea Institute of Industrial Technology Evaluation and Planning (KEIT) upon the support by the Ministry of Science and ICT.
2024.10.21 View 5949
KAIST Develops Thread-like, Flexible Thermoelectric Materials Applicable in Extreme Environments
A team of Korean researchers developed a thermoelectric material that can be used in wearable devices, such as smart clothing, and while maintaining stable thermal energy performance even in extreme environments. It has dramatically resolved the dilemma of striking the balance between achieving good performance and the mechanical flexibility of thermoelectric materials, which has been a long-standing challenge in the field of thermoelectric materials, and has also proven the possibility of commercialization.
KAIST (President Kwang-Hyung Lee) announced on the 21st that a joint research team of Professor Yeon Sik Jung of the Department of Materials Science and Engineering and Professor Inkyu Park of the Department of Mechanical Engineering, in collaboration with the research teams of Professor Min-Wook Oh of Hanbat National University (President Yong Jun Oh) and Dr. Jun-Ho Jeong of the Korea Institute of Machinery and Materials (President Seoghyun Ryu), have successfully developed ‘bismuth telluride (Bi2Te3) thermoelectric fibers,’ an innovative energy harvesting solution for next-generation flexible electronic devices.
Thermoelectric materials are materials that generate voltage when there is a temperature difference and convert thermal energy into electrical energy. Currently, about 70% of energy being lost as wasted heat, so due attention is being given to research on these as sustainable energy materials that can recover and harvesting energy from this waste heat.
Most of the heat sources around us are curved, such as the human body, vehicle exhaust pipes, and cooling fins. Inorganic thermoelectric materials based on ceramic materials boast high thermoelectric performance, but they are fragile and difficult to produce in curved shapes. On the other hand, flexible thermoelectric materials using existing polymer binders can be applied to surfaces of various shapes, but their performance was limited due to the low electrical conductivity and high thermal resistance of the polymer.
Existing flexible thermoelectric materials contain polymer additives, but the inorganic thermoelectric material developed by the research team is not flexible, so they overcame these limitations by twisting nano ribbons instead of additives to produce a thread-shaped thermoelectric material. Inspired by the flexibility of inorganic nano ribbons, the research team used a nanomold-based electron beam deposition technique to continuously deposit nano ribbons and then twisted them into a thread shape to create bismuth telluride (Bi2Te3) inorganic thermoelectric fibers.
These inorganic thermoelectric fibers have higher bending strength than existing thermoelectric materials, and showed almost no change in electrical properties even after repeated bending and tensile tests of more than 1,000 times. The thermoelectric device created by the research team generates electricity using temperature differences, and if clothes are made with fiber-type thermoelectric devices, electricity can be generated from body temperature to operate other electronic devices.
< Figure 1. Schematic diagram and actual image of the all-inorganic flexible thermoelectric yarn made without polymer additives >
In fact, the possibility of commercialization was proven through a demonstration of collecting energy by embedding thermoelectric fibers in life jackets or clothing. In addition, it opened up the possibility of building a high-efficiency energy harvesting system that recycles waste heat by utilizing the temperature difference between the hot fluid inside a pipe and the cold air outside in industrial settings.
Professor Yeon Sik Jung said, "The inorganic flexible thermoelectric material developed in this study can be used in wearable devices such as smart clothing, and it can maintain stable performance even in extreme environments, so it has a high possibility of being commercialized through additional research in the future." Professor Inkyu Park also emphasized, "This technology will become the core of next-generation energy harvesting technology, and it is expected to play an important role in various fields from waste heat utilization in industrial sites to personal wearable self-power generation devices."
This study, in which Hanhwi Jang, a Ph.D. student at KAIST's Department of Materials Science and Engineering, Professor Junseong Ahn of Korea University, Sejong Campus, and Dr. Yongrok Jeong of Korea Atomic Energy Research Institute contributed equally as joint first authors, was published in the online edition of the international academic journal Advanced Materials on September 17, and was selected as the back-cover paper in recognition of its excellence. (Paper title: Flexible All-Inorganic Thermoelectric Yarns)
Meanwhile, this study was conducted through the Mid-career Researcher Support Program and the Future Materials Discovery Program of the National Research Foundation of Korea, and the support from the Global Bio-Integrated Materials Center, the Ministry of Trade, Industry and Energy, and the Korea Institute of Industrial Technology Evaluation and Planning (KEIT) upon the support by the Ministry of Science and ICT.
2024.10.21 View 5949 -
 KAIST Develops Technology for the Precise Diagnosis of Electric Vehicle Batteries Using Small Currents
Accurately diagnosing the state of electric vehicle (EV) batteries is essential for their efficient management and safe use. KAIST researchers have developed a new technology that can diagnose and monitor the state of batteries with high precision using only small amounts of current, which is expected to maximize the batteries’ long-term stability and efficiency.
KAIST (represented by President Kwang Hyung Lee) announced on the 17th of October that a research team led by Professors Kyeongha Kwon and Sang-Gug Lee from the School of Electrical Engineering had developed electrochemical impedance spectroscopy (EIS) technology that can be used to improve the stability and performance of high-capacity batteries in electric vehicles.
EIS is a powerful tool that measures the impedance* magnitude and changes in a battery, allowing the evaluation of battery efficiency and loss. It is considered an important tool for assessing the state of charge (SOC) and state of health (SOH) of batteries. Additionally, it can be used to identify thermal characteristics, chemical/physical changes, predict battery life, and determine the causes of failures. *Battery Impedance: A measure of the resistance to current flow within the battery that is used to assess battery performance and condition.
However, traditional EIS equipment is expensive and complex, making it difficult to install, operate, and maintain. Moreover, due to sensitivity and precision limitations, applying current disturbances of several amperes (A) to a battery can cause significant electrical stress, increasing the risk of battery failure or fire and making it difficult to use in practice.
< Figure 1. Flow chart for diagnosis and prevention of unexpected combustion via the use of the electrochemical impedance spectroscopy (EIS) for the batteries for electric vehicles. >
To address this, the KAIST research team developed and validated a low-current EIS system for diagnosing the condition and health of high-capacity EV batteries. This EIS system can precisely measure battery impedance with low current disturbances (10mA), minimizing thermal effects and safety issues during the measurement process.
In addition, the system minimizes bulky and costly components, making it easy to integrate into vehicles. The system was proven effective in identifying the electrochemical properties of batteries under various operating conditions, including different temperatures and SOC levels.
Professor Kyeongha Kwon (the corresponding author) explained, “This system can be easily integrated into the battery management system (BMS) of electric vehicles and has demonstrated high measurement accuracy while significantly reducing the cost and complexity compared to traditional high-current EIS methods. It can contribute to battery diagnosis and performance improvements not only for electric vehicles but also for energy storage systems (ESS).”
This research, in which Young-Nam Lee, a doctoral student in the School of Electrical Engineering at KAIST participated as the first author, was published in the prestigious international journal IEEE Transactions on Industrial Electronics (top 2% in the field; IF 7.5) on September 5th. (Paper Title: Small-Perturbation Electrochemical Impedance Spectroscopy System With High Accuracy for High-Capacity Batteries in Electric Vehicles, Link: https://ieeexplore.ieee.org/document/10666864)
< Figure 2. Impedance measurement results of large-capacity batteries for electric vehicles. ZEW (commercial EW; MP10, Wonatech) versus ZMEAS (proposed system) >
This research was supported by the Basic Research Program of the National Research Foundation of Korea, the Next-Generation Intelligent Semiconductor Technology Development Program of the Korea Evaluation Institute of Industrial Technology, and the AI Semiconductor Graduate Program of the Institute of Information & Communications Technology Planning & Evaluation.
2024.10.17 View 8110
KAIST Develops Technology for the Precise Diagnosis of Electric Vehicle Batteries Using Small Currents
Accurately diagnosing the state of electric vehicle (EV) batteries is essential for their efficient management and safe use. KAIST researchers have developed a new technology that can diagnose and monitor the state of batteries with high precision using only small amounts of current, which is expected to maximize the batteries’ long-term stability and efficiency.
KAIST (represented by President Kwang Hyung Lee) announced on the 17th of October that a research team led by Professors Kyeongha Kwon and Sang-Gug Lee from the School of Electrical Engineering had developed electrochemical impedance spectroscopy (EIS) technology that can be used to improve the stability and performance of high-capacity batteries in electric vehicles.
EIS is a powerful tool that measures the impedance* magnitude and changes in a battery, allowing the evaluation of battery efficiency and loss. It is considered an important tool for assessing the state of charge (SOC) and state of health (SOH) of batteries. Additionally, it can be used to identify thermal characteristics, chemical/physical changes, predict battery life, and determine the causes of failures. *Battery Impedance: A measure of the resistance to current flow within the battery that is used to assess battery performance and condition.
However, traditional EIS equipment is expensive and complex, making it difficult to install, operate, and maintain. Moreover, due to sensitivity and precision limitations, applying current disturbances of several amperes (A) to a battery can cause significant electrical stress, increasing the risk of battery failure or fire and making it difficult to use in practice.
< Figure 1. Flow chart for diagnosis and prevention of unexpected combustion via the use of the electrochemical impedance spectroscopy (EIS) for the batteries for electric vehicles. >
To address this, the KAIST research team developed and validated a low-current EIS system for diagnosing the condition and health of high-capacity EV batteries. This EIS system can precisely measure battery impedance with low current disturbances (10mA), minimizing thermal effects and safety issues during the measurement process.
In addition, the system minimizes bulky and costly components, making it easy to integrate into vehicles. The system was proven effective in identifying the electrochemical properties of batteries under various operating conditions, including different temperatures and SOC levels.
Professor Kyeongha Kwon (the corresponding author) explained, “This system can be easily integrated into the battery management system (BMS) of electric vehicles and has demonstrated high measurement accuracy while significantly reducing the cost and complexity compared to traditional high-current EIS methods. It can contribute to battery diagnosis and performance improvements not only for electric vehicles but also for energy storage systems (ESS).”
This research, in which Young-Nam Lee, a doctoral student in the School of Electrical Engineering at KAIST participated as the first author, was published in the prestigious international journal IEEE Transactions on Industrial Electronics (top 2% in the field; IF 7.5) on September 5th. (Paper Title: Small-Perturbation Electrochemical Impedance Spectroscopy System With High Accuracy for High-Capacity Batteries in Electric Vehicles, Link: https://ieeexplore.ieee.org/document/10666864)
< Figure 2. Impedance measurement results of large-capacity batteries for electric vehicles. ZEW (commercial EW; MP10, Wonatech) versus ZMEAS (proposed system) >
This research was supported by the Basic Research Program of the National Research Foundation of Korea, the Next-Generation Intelligent Semiconductor Technology Development Program of the Korea Evaluation Institute of Industrial Technology, and the AI Semiconductor Graduate Program of the Institute of Information & Communications Technology Planning & Evaluation.
2024.10.17 View 8110 -
 KAIST Industrial Design’s Professor Sangmin Bae’s team selected as Top 20 of James Dyson Award 2024
KAIST (President Kwang-Hyung Lee) announced that the 'Oxynizer', a non-electrical medical oxygen generator for developing countries designed by Professor Sangmin Bae's team in the Department of Industrial Design, has been selected to be the Top 20 of the James Dyson Award 2024. At the same time, it was announced on the 16th that it was selected as one of the top 100 ‘Prototypes for Humanity’ 2024 and will be exhibited in Dubai in November.
< Photo 1. Photo of the award-winning team of Professor Sangmin Bae’s students of KAIST Department of Industrial Designs at the James Dyson Award 2024 announcement of the National Winners >
The James Dyson Award is a design award hosted by Sir James Dyson, founder of Dyson, and receives ideas for solving everyday problems from next-generation engineers and designers around the world, and selects and awards innovative and excellent designs every year.
The ‘Oxynizer’ developed by Professor Sangmin Bae’s team was selected as the winner of the screening within Korea in September after competing with 122 domestic teams, and was awarded a prize of 5,000 pounds for idea advancement, product development, and commercialization.
< Photo 2. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
In addition, on October 16th, it was selected as one of the top 20 international winners among 1,911 competing works from 29 countries around the world. The international winner will be selected by Sir James Dyson and announced on November 13th. The international competition winner will receive a prize of £5,000, and the winner will receive an additional £30,000, giving them the opportunity to commercialize their idea.
‘Prototype for Humanity’ is a global project hosted by Art Dubai Group and carried out in collaboration with Dubai Future Foundation, Dubai Arts & Culture Authority, and Dubai International Financial Center. It is a forum for international cooperation where leading universities around the world, including Harvard University and MIT, participate to discuss global problems and solutions.
‘Oxynizer’ was selected on September 11 as one of the top 100 out of 3,000 entries submitted by universities in over 100 countries, and will be exhibited at the Jumeirah Emirates Towers of Dubai Future Foundation from November 17 to 22. The organizers will select the top five during the exhibition period, and will award a total of $100,000 in prize money to the winners to support their research.
The ‘Oxynizer’ is a device developed by students Jiwon Kim, Kyeongho Park, Seung-Jun Lee, Jiwon Lee, Yeohyeon Jeong, and Jungwoo Kim under the guidance of Professor Sangmin Bae of KAIST, and is the result of research conducted in the ‘Design Project 1’ class for the graduate students of the Department of Industrial Design at KAIST.
< Photo 3. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
This device was designed to solve the problem of difficulty in supplying oxygen in developing countries due to high installation and maintenance costs. The device was designed to create concentrated oxygen to supply it to a patient in urgent need using an air pump for bicycles, which should be found more easily than a medical oxygen tank.
Professor Sangmin Bae said, “This device creates oxygen using a bicycle air pump and supplies it to patients, and it can separate water vapor and nitrogen in the air using silica gel and zeolite, which are the main materials of the filter, to supply oxygen with a concentration of up to 50%.” “In addition, the filter can be heated and reused after 120 hours of use, so it has the advantage of being able to be used semi-permanently,” he emphasized.
< Photo 4. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
The results of the self-research derived from the KAIST Industrial Design Department class were selected as a world-class award winner and exhibition piece in competition with excellent universities around the world, once again proving the global competitiveness of the KAIST Industrial Design Department.
2024.10.16 View 7557
KAIST Industrial Design’s Professor Sangmin Bae’s team selected as Top 20 of James Dyson Award 2024
KAIST (President Kwang-Hyung Lee) announced that the 'Oxynizer', a non-electrical medical oxygen generator for developing countries designed by Professor Sangmin Bae's team in the Department of Industrial Design, has been selected to be the Top 20 of the James Dyson Award 2024. At the same time, it was announced on the 16th that it was selected as one of the top 100 ‘Prototypes for Humanity’ 2024 and will be exhibited in Dubai in November.
< Photo 1. Photo of the award-winning team of Professor Sangmin Bae’s students of KAIST Department of Industrial Designs at the James Dyson Award 2024 announcement of the National Winners >
The James Dyson Award is a design award hosted by Sir James Dyson, founder of Dyson, and receives ideas for solving everyday problems from next-generation engineers and designers around the world, and selects and awards innovative and excellent designs every year.
The ‘Oxynizer’ developed by Professor Sangmin Bae’s team was selected as the winner of the screening within Korea in September after competing with 122 domestic teams, and was awarded a prize of 5,000 pounds for idea advancement, product development, and commercialization.
< Photo 2. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
In addition, on October 16th, it was selected as one of the top 20 international winners among 1,911 competing works from 29 countries around the world. The international winner will be selected by Sir James Dyson and announced on November 13th. The international competition winner will receive a prize of £5,000, and the winner will receive an additional £30,000, giving them the opportunity to commercialize their idea.
‘Prototype for Humanity’ is a global project hosted by Art Dubai Group and carried out in collaboration with Dubai Future Foundation, Dubai Arts & Culture Authority, and Dubai International Financial Center. It is a forum for international cooperation where leading universities around the world, including Harvard University and MIT, participate to discuss global problems and solutions.
‘Oxynizer’ was selected on September 11 as one of the top 100 out of 3,000 entries submitted by universities in over 100 countries, and will be exhibited at the Jumeirah Emirates Towers of Dubai Future Foundation from November 17 to 22. The organizers will select the top five during the exhibition period, and will award a total of $100,000 in prize money to the winners to support their research.
The ‘Oxynizer’ is a device developed by students Jiwon Kim, Kyeongho Park, Seung-Jun Lee, Jiwon Lee, Yeohyeon Jeong, and Jungwoo Kim under the guidance of Professor Sangmin Bae of KAIST, and is the result of research conducted in the ‘Design Project 1’ class for the graduate students of the Department of Industrial Design at KAIST.
< Photo 3. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
This device was designed to solve the problem of difficulty in supplying oxygen in developing countries due to high installation and maintenance costs. The device was designed to create concentrated oxygen to supply it to a patient in urgent need using an air pump for bicycles, which should be found more easily than a medical oxygen tank.
Professor Sangmin Bae said, “This device creates oxygen using a bicycle air pump and supplies it to patients, and it can separate water vapor and nitrogen in the air using silica gel and zeolite, which are the main materials of the filter, to supply oxygen with a concentration of up to 50%.” “In addition, the filter can be heated and reused after 120 hours of use, so it has the advantage of being able to be used semi-permanently,” he emphasized.
< Photo 4. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
The results of the self-research derived from the KAIST Industrial Design Department class were selected as a world-class award winner and exhibition piece in competition with excellent universities around the world, once again proving the global competitiveness of the KAIST Industrial Design Department.
2024.10.16 View 7557 -
 KAIST Succeeds in the Real-time Observation of Organoids using Holotomography
Organoids, which are 3D miniature organs that mimic the structure and function of human organs, play an essential role in disease research and drug development. A Korean research team has overcome the limitations of existing imaging technologies, succeeding in the real-time, high-resolution observation of living organoids.
KAIST (represented by President Kwang Hyung Lee) announced on the 14th of October that Professor YongKeun Park’s research team from the Department of Physics, in collaboration with the Genome Editing Research Center (Director Bon-Kyoung Koo) of the Institute for Basic Science (IBS President Do-Young Noh) and Tomocube Inc., has developed an imaging technology using holotomography to observe live, small intestinal organoids in real time at a high resolution.
Existing imaging techniques have struggled to observe living organoids in high resolution over extended periods and often required additional treatments like fluorescent staining.
< Figure 1. Overview of the low-coherence HT workflow. Using holotomography, 3D morphological restoration and quantitative analysis of organoids can be performed. In order to improve the limited field of view, which is a limitation of the microscope, our research team utilized a large-area field of view combination algorithm and made a 3D restoration by acquiring multi-focus holographic images for 3D measurements. After that, the organoids were compartmentalized to divide the parts necessary for analysis and quantitatively evaluated the protein concentration measurable from the refractive index and the survival rate of the organoids. >
The research team introduced holotomography technology to address these issues, which provides high-resolution images without the need for fluorescent staining and allows for the long-term observation of dynamic changes in real time without causing cell damage.
The team validated this technology using small intestinal organoids from experimental mice and were able to observe various cell structures inside the organoids in detail. They also captured dynamic changes such as growth processes, cell division, and cell death in real time using holotomography.
Additionally, the technology allowed for the precise analysis of the organoids' responses to drug treatments, verifying the survival of the cells.
The researchers believe that this breakthrough will open new horizons in organoid research, enabling the greater utilization of organoids in drug development, personalized medicine, and regenerative medicine.
Future research is expected to more accurately replicate the in vivo environment of organoids, contributing significantly to a more detailed understanding of various life phenomena at the cellular level through more precise 3D imaging.
< Figure 2. Real-time organoid morphology analysis. Using holotomography, it is possible to observe the lumen and villus development process of intestinal organoids in real time, which was difficult to observe with a conventional microscope. In addition, various information about intestinal organoids can be obtained by quantifying the size and protein amount of intestinal organoids through image analysis. >
Dr. Mahn Jae Lee, a graduate of KAIST's Graduate School of Medical Science and Engineering, currently at Chungnam National University Hospital and the first author of the paper, commented, "This research represents a new imaging technology that surpasses previous limitations and is expected to make a major contribution to disease modeling, personalized treatments, and drug development research using organoids."
The research results were published online in the international journal Experimental & Molecular Medicine on October 1, 2024, and the technology has been recognized for its applicability in various fields of life sciences. (Paper title: “Long-term three-dimensional high-resolution imaging of live unlabeled small intestinal organoids via low-coherence holotomography”)
This research was supported by the National Research Foundation of Korea, KAIST Institutes, and the Institute for Basic Science.
2024.10.14 View 6532
KAIST Succeeds in the Real-time Observation of Organoids using Holotomography
Organoids, which are 3D miniature organs that mimic the structure and function of human organs, play an essential role in disease research and drug development. A Korean research team has overcome the limitations of existing imaging technologies, succeeding in the real-time, high-resolution observation of living organoids.
KAIST (represented by President Kwang Hyung Lee) announced on the 14th of October that Professor YongKeun Park’s research team from the Department of Physics, in collaboration with the Genome Editing Research Center (Director Bon-Kyoung Koo) of the Institute for Basic Science (IBS President Do-Young Noh) and Tomocube Inc., has developed an imaging technology using holotomography to observe live, small intestinal organoids in real time at a high resolution.
Existing imaging techniques have struggled to observe living organoids in high resolution over extended periods and often required additional treatments like fluorescent staining.
< Figure 1. Overview of the low-coherence HT workflow. Using holotomography, 3D morphological restoration and quantitative analysis of organoids can be performed. In order to improve the limited field of view, which is a limitation of the microscope, our research team utilized a large-area field of view combination algorithm and made a 3D restoration by acquiring multi-focus holographic images for 3D measurements. After that, the organoids were compartmentalized to divide the parts necessary for analysis and quantitatively evaluated the protein concentration measurable from the refractive index and the survival rate of the organoids. >
The research team introduced holotomography technology to address these issues, which provides high-resolution images without the need for fluorescent staining and allows for the long-term observation of dynamic changes in real time without causing cell damage.
The team validated this technology using small intestinal organoids from experimental mice and were able to observe various cell structures inside the organoids in detail. They also captured dynamic changes such as growth processes, cell division, and cell death in real time using holotomography.
Additionally, the technology allowed for the precise analysis of the organoids' responses to drug treatments, verifying the survival of the cells.
The researchers believe that this breakthrough will open new horizons in organoid research, enabling the greater utilization of organoids in drug development, personalized medicine, and regenerative medicine.
Future research is expected to more accurately replicate the in vivo environment of organoids, contributing significantly to a more detailed understanding of various life phenomena at the cellular level through more precise 3D imaging.
< Figure 2. Real-time organoid morphology analysis. Using holotomography, it is possible to observe the lumen and villus development process of intestinal organoids in real time, which was difficult to observe with a conventional microscope. In addition, various information about intestinal organoids can be obtained by quantifying the size and protein amount of intestinal organoids through image analysis. >
Dr. Mahn Jae Lee, a graduate of KAIST's Graduate School of Medical Science and Engineering, currently at Chungnam National University Hospital and the first author of the paper, commented, "This research represents a new imaging technology that surpasses previous limitations and is expected to make a major contribution to disease modeling, personalized treatments, and drug development research using organoids."
The research results were published online in the international journal Experimental & Molecular Medicine on October 1, 2024, and the technology has been recognized for its applicability in various fields of life sciences. (Paper title: “Long-term three-dimensional high-resolution imaging of live unlabeled small intestinal organoids via low-coherence holotomography”)
This research was supported by the National Research Foundation of Korea, KAIST Institutes, and the Institute for Basic Science.
2024.10.14 View 6532 -
 ‘Realizing the Dream Beyond Limits’… KAIST Space Institute opens
“KAIST Space Institute will present a new paradigm for space research and education, foster creative talents, and become a space research center to lead the advancement of national space initiatives” (KAIST President Kwang-Hyung Lee)
< Vision Declaration Ceremony Photo during Space Research Institute Opening Ceremony >
KAIST (President Kwang-Hyung Lee) opened the ‘Space Institute’, which brings together all of KAIST’s space technology capabilities to realize the dream of mankind leaping higher toward space, and held the opening ceremony on September 30th in the main auditorium of Daejeon. The opening ceremony included a vision declaration ceremony and a special lecture for KAIST Space Institute.
KAIST Space Institute is a newly established organization for space missions and convergence/core technology research that can lead the new space era. In September 2022, a promotion team was established to plan the specifics, and it was officially established as an organization within the school in April of this year to lead to this opening ceremony.
< Group Commemorative Photo during Space Research Institute Opening Ceremony >
Under the slogan of ‘Realizing the dreams beyond limits,’ the organization is to carry out projects to realize the vision of ▴ conducting space research that aims to be the first and expand the horizons of human life, ▴ presenting a new paradigm for space research and education as a global leading university space research cluster, ▴ contributing to domestic space technology innovation and space industry ecosystem establishment through verification and development of challenging space missions, and ▴ supporting sustainable national space development by fostering creative talents to lead space convergence.
To this end, the space research organizations that have been operated independently by various departments have been integrated and reorganized under the name of the Space Institute, and the following subordinate organizations will be established in the future: ▴ Artificial Satellite Research Institute, ▴ Space Technology Innovation Talent Training Center, ▴ Space Core Technology Research Institute, and ▴ Space Convergence Technology Research Institute.
At the same time, ▴ Hanwha Space Hub-KAIST Space Research Center, ▴ Perigee-KAIST Rocket Research Center, and ▴ Future Space Education Center will be reorganized under the Space Institute to pool their capabilities.
< President Kwang-Hyung Lee giving a welcoming speech at Space Research Institute Opening Ceremony >
The Satellite Research Institute, a subordinate organization, successfully developed and launched Korea’s first mass-produced ‘ultra-small cluster satellite 1’ in April of this year. It is currently conducting active research with the goal of launching a satellite in 2027 to verify active control technology for space objects.
The first special lecture was given by Professor Se-jin Kwon of the Department of Aerospace Engineering on the topic of ‘KAIST Space Exploration Journey and Vision.’ The institute looked back on its space development history and present future research and development directions and operational plans.
Next, Professor Daniel J. Scheeres, who was appointed as Co-director of the Space Institute and a Visiting Professor of KAIST Department of Aerospace Engineering, delivered a message on the topic of ‘The Future of Asteroid Exploration.’ He talked about preventing asteroid collisions, and lectured on the spirit of challenge for continuous exploration and future research issues.
Co-director Scheeres is a leading scholar in the fields of space engineering and celestial dynamics who was invited to lead the KAIST Space Institute’s leading international cooperation activities. He is well known as a key researcher who led asteroid research, including the ‘DART’ mission, in which the National Aeronautics and Space Administration (NASA) experimented with changing the trajectory an asteroid by colliding it with a spacecraft.
After its full-fledged opening, the Space Institute will be operated as an open organization where domestic and foreign experts as well as KAIST students can freely participate in research and education.
< Director Jae-heung Han introducing the organization at Space Research Institute Opening Ceremony >
KAIST Space Institute Director Jae-heung Han said, “On the 10th anniversary of the death of the late Dr. Soon-dal Choi, who helped establish space technology in Korea, we have established KAIST Space Institute to inherit the spirit of ‘Uri-Byul’, our first satellite, and develop subsequent achievements.”
He also said, “With a sense of mission to challenge limitations and venture into the greater unknown, we will strive to strengthen our space research and development capabilities and our global status as a leading aerospace country.”
2024.09.30 View 4138
‘Realizing the Dream Beyond Limits’… KAIST Space Institute opens
“KAIST Space Institute will present a new paradigm for space research and education, foster creative talents, and become a space research center to lead the advancement of national space initiatives” (KAIST President Kwang-Hyung Lee)
< Vision Declaration Ceremony Photo during Space Research Institute Opening Ceremony >
KAIST (President Kwang-Hyung Lee) opened the ‘Space Institute’, which brings together all of KAIST’s space technology capabilities to realize the dream of mankind leaping higher toward space, and held the opening ceremony on September 30th in the main auditorium of Daejeon. The opening ceremony included a vision declaration ceremony and a special lecture for KAIST Space Institute.
KAIST Space Institute is a newly established organization for space missions and convergence/core technology research that can lead the new space era. In September 2022, a promotion team was established to plan the specifics, and it was officially established as an organization within the school in April of this year to lead to this opening ceremony.
< Group Commemorative Photo during Space Research Institute Opening Ceremony >
Under the slogan of ‘Realizing the dreams beyond limits,’ the organization is to carry out projects to realize the vision of ▴ conducting space research that aims to be the first and expand the horizons of human life, ▴ presenting a new paradigm for space research and education as a global leading university space research cluster, ▴ contributing to domestic space technology innovation and space industry ecosystem establishment through verification and development of challenging space missions, and ▴ supporting sustainable national space development by fostering creative talents to lead space convergence.
To this end, the space research organizations that have been operated independently by various departments have been integrated and reorganized under the name of the Space Institute, and the following subordinate organizations will be established in the future: ▴ Artificial Satellite Research Institute, ▴ Space Technology Innovation Talent Training Center, ▴ Space Core Technology Research Institute, and ▴ Space Convergence Technology Research Institute.
At the same time, ▴ Hanwha Space Hub-KAIST Space Research Center, ▴ Perigee-KAIST Rocket Research Center, and ▴ Future Space Education Center will be reorganized under the Space Institute to pool their capabilities.
< President Kwang-Hyung Lee giving a welcoming speech at Space Research Institute Opening Ceremony >
The Satellite Research Institute, a subordinate organization, successfully developed and launched Korea’s first mass-produced ‘ultra-small cluster satellite 1’ in April of this year. It is currently conducting active research with the goal of launching a satellite in 2027 to verify active control technology for space objects.
The first special lecture was given by Professor Se-jin Kwon of the Department of Aerospace Engineering on the topic of ‘KAIST Space Exploration Journey and Vision.’ The institute looked back on its space development history and present future research and development directions and operational plans.
Next, Professor Daniel J. Scheeres, who was appointed as Co-director of the Space Institute and a Visiting Professor of KAIST Department of Aerospace Engineering, delivered a message on the topic of ‘The Future of Asteroid Exploration.’ He talked about preventing asteroid collisions, and lectured on the spirit of challenge for continuous exploration and future research issues.
Co-director Scheeres is a leading scholar in the fields of space engineering and celestial dynamics who was invited to lead the KAIST Space Institute’s leading international cooperation activities. He is well known as a key researcher who led asteroid research, including the ‘DART’ mission, in which the National Aeronautics and Space Administration (NASA) experimented with changing the trajectory an asteroid by colliding it with a spacecraft.
After its full-fledged opening, the Space Institute will be operated as an open organization where domestic and foreign experts as well as KAIST students can freely participate in research and education.
< Director Jae-heung Han introducing the organization at Space Research Institute Opening Ceremony >
KAIST Space Institute Director Jae-heung Han said, “On the 10th anniversary of the death of the late Dr. Soon-dal Choi, who helped establish space technology in Korea, we have established KAIST Space Institute to inherit the spirit of ‘Uri-Byul’, our first satellite, and develop subsequent achievements.”
He also said, “With a sense of mission to challenge limitations and venture into the greater unknown, we will strive to strengthen our space research and development capabilities and our global status as a leading aerospace country.”
2024.09.30 View 4138 -
 Professor Jimin Park and Dr. Inho Kim join the ranks of the 2024 "35 Innovators Under 35" by the MIT Technology Review
< (From left) Professor Jimin Park of the Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate of the Department of Materials Science and Engineering >
KAIST (represented by President Kwang-Hyung Lee) announced on the 13th of September that Professor Jimin Park from KAIST’s Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate from the Department of Materials Science and Engineering (currently a postdoctoral researcher at Caltech), were selected by the MIT Technology Review as the 2024 "35 Innovators Under 35”.
The MIT Technology Review, first published in 1899 by the Massachusetts Institute of Technology, is the world’s oldest and most influential magazine on science and technology, offering in-depth analysis across various technology fields, expanding knowledge and providing insights into cutting-edge technology trends.
Since 1999, the magazine has annually named 35 innovators under the age of 35, recognizing young talents making groundbreaking contributions in modern technology fields. The recognition is globally considered a prestigious honor and a dream for young researchers in the science and technology community.
< Image 1. Introduction for Professor Jimin Park at the Meet 35 Innovators Under 35 Summit 2024 >
Professor Jimin Park is developing next-generation bio-interfaces that link artificial materials with living organisms, and is engaged in advanced research in areas such as digital healthcare and carbon-neutral compound manufacturing technologies. In 2014, Professor Park was also recognized as one of the ‘Asia Pacific Innovators Under 35’ by the MIT Technology Review, which highlights young scientists in the Asia-Pacific region.
Professor Park responded, “It’s a great honor to be named as one of the young innovators by the MIT Technology Review, a symbol of innovation with a long history. I will continue to pursue challenging, interdisciplinary research to develop next-generation interfaces that seamlessly connect artificial materials and living organisms, from atomic to system levels.”
< Image 2. Introduction for Dr. Inho Kim as the 2024 Innovator of Materials Science for 35 Innovators Under 35 >
Dr. Inho Kim, who earned his PhD from KAIST in 2020 under the supervision of Professor Sang Ouk Kim from the Department of Materials Science and Engineering, recently succeeded in developing a new artificial muscle using composite fibers. This new material is considered the most human-like muscle ever reported in scientific literature, while also being 17 times stronger than natural human muscle.
Dr. Kim is researching the application of artificial muscle fibers in next-generation wearable assistive devices that move more naturally, like humans or animals, noting that the fibers are lightweight, flexible, and exhibit conductivity during contraction, enabling real-time feedback. Recognized for this potential, Dr. Inho Kim was named one of the '35 Innovators Under 35' this year, making him the first researcher to win the honor with the research conducted at KAIST and a PhD earned from Korea.
Dr. Kim stated, “I aim to develop robots using these new materials that can replace today’s expensive and heavy exoskeleton suits by eliminating motors and rigid frames. This will significantly reduce costs and allow for better customization, making cutting-edge technology more accessible to those who need it most, like children with cerebral palsy.”
2024.09.13 View 9994
Professor Jimin Park and Dr. Inho Kim join the ranks of the 2024 "35 Innovators Under 35" by the MIT Technology Review
< (From left) Professor Jimin Park of the Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate of the Department of Materials Science and Engineering >
KAIST (represented by President Kwang-Hyung Lee) announced on the 13th of September that Professor Jimin Park from KAIST’s Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate from the Department of Materials Science and Engineering (currently a postdoctoral researcher at Caltech), were selected by the MIT Technology Review as the 2024 "35 Innovators Under 35”.
The MIT Technology Review, first published in 1899 by the Massachusetts Institute of Technology, is the world’s oldest and most influential magazine on science and technology, offering in-depth analysis across various technology fields, expanding knowledge and providing insights into cutting-edge technology trends.
Since 1999, the magazine has annually named 35 innovators under the age of 35, recognizing young talents making groundbreaking contributions in modern technology fields. The recognition is globally considered a prestigious honor and a dream for young researchers in the science and technology community.
< Image 1. Introduction for Professor Jimin Park at the Meet 35 Innovators Under 35 Summit 2024 >
Professor Jimin Park is developing next-generation bio-interfaces that link artificial materials with living organisms, and is engaged in advanced research in areas such as digital healthcare and carbon-neutral compound manufacturing technologies. In 2014, Professor Park was also recognized as one of the ‘Asia Pacific Innovators Under 35’ by the MIT Technology Review, which highlights young scientists in the Asia-Pacific region.
Professor Park responded, “It’s a great honor to be named as one of the young innovators by the MIT Technology Review, a symbol of innovation with a long history. I will continue to pursue challenging, interdisciplinary research to develop next-generation interfaces that seamlessly connect artificial materials and living organisms, from atomic to system levels.”
< Image 2. Introduction for Dr. Inho Kim as the 2024 Innovator of Materials Science for 35 Innovators Under 35 >
Dr. Inho Kim, who earned his PhD from KAIST in 2020 under the supervision of Professor Sang Ouk Kim from the Department of Materials Science and Engineering, recently succeeded in developing a new artificial muscle using composite fibers. This new material is considered the most human-like muscle ever reported in scientific literature, while also being 17 times stronger than natural human muscle.
Dr. Kim is researching the application of artificial muscle fibers in next-generation wearable assistive devices that move more naturally, like humans or animals, noting that the fibers are lightweight, flexible, and exhibit conductivity during contraction, enabling real-time feedback. Recognized for this potential, Dr. Inho Kim was named one of the '35 Innovators Under 35' this year, making him the first researcher to win the honor with the research conducted at KAIST and a PhD earned from Korea.
Dr. Kim stated, “I aim to develop robots using these new materials that can replace today’s expensive and heavy exoskeleton suits by eliminating motors and rigid frames. This will significantly reduce costs and allow for better customization, making cutting-edge technology more accessible to those who need it most, like children with cerebral palsy.”
2024.09.13 View 9994 -
 KAIST ISSS Research Session Captivates 150↑ International Scholars, Achieve Major Success
< Photo. Scholars gatheres for NRF Information Session at Chung Keun Mo Hall >
KAIST’s International Office, headed by Vice President Soyoung Kim, successfully organized the ‘NRF Information Session for International Scholars’ on September 11, 2024, in collaboration with the National Research Foundation of Korea (NRF).
The event was held at KAIST’s main campus to enourage the international scholar’s active participation in research projects and support their establishment of stable research environment and integration into Korea’s academic community by introducing NRF’s key research programs.
Divided into two main segments – science and engineering, and humanities and social sciences – the session attracted approximately 150 international faculty and researchers from 23 universities across the nation.
The event commenced with a keynote address by Vice President Soyoung Kim, followed by a presentation from Dr. Seol Min of the National Research Foundation, who highlighted basic research initiatives in the science and technology sector. Subsequently, Professor Daniel Martin from the Digital Humanities and Social Sciences Department and Professor Thomas Steinberger from the Department of Business and Technology Management presented practical research project support case studies, sharing invaluable insights gained from their domestic research experiences.
Following the information session, participants engaged in a networking event, where researchers involved in major R&D projects exchanged insights and discussed their ongoing research initiatives.
An international professor remarked, “My understanding of NRF’s research programs for international researchers has broadened considerably. I am now more inclined to actively participate in projects organized by NRF in the future.”
Vice President Kim expressed her aspiration that the event would address the challenges faced by researchers and offer essential support to those engaged in research projects. “We will stay attuned to the needs of the research community and work towards creating a more supportive research environment,” said the VP.
Meanwhile, KAIST hosts a distinguished faculty comprising 134 professors from 22 countries and 71 researchers representing 23 nations, all contributing to groundbreaking academic achievements. Additionally, KAIST is home to over 1,000 international students from more than 100 countries, actively pursuing their studies. This diverse composition of global talent reinforces KAIST's position as a leading international hub for research and education.
2024.09.13 View 6461
KAIST ISSS Research Session Captivates 150↑ International Scholars, Achieve Major Success
< Photo. Scholars gatheres for NRF Information Session at Chung Keun Mo Hall >
KAIST’s International Office, headed by Vice President Soyoung Kim, successfully organized the ‘NRF Information Session for International Scholars’ on September 11, 2024, in collaboration with the National Research Foundation of Korea (NRF).
The event was held at KAIST’s main campus to enourage the international scholar’s active participation in research projects and support their establishment of stable research environment and integration into Korea’s academic community by introducing NRF’s key research programs.
Divided into two main segments – science and engineering, and humanities and social sciences – the session attracted approximately 150 international faculty and researchers from 23 universities across the nation.
The event commenced with a keynote address by Vice President Soyoung Kim, followed by a presentation from Dr. Seol Min of the National Research Foundation, who highlighted basic research initiatives in the science and technology sector. Subsequently, Professor Daniel Martin from the Digital Humanities and Social Sciences Department and Professor Thomas Steinberger from the Department of Business and Technology Management presented practical research project support case studies, sharing invaluable insights gained from their domestic research experiences.
Following the information session, participants engaged in a networking event, where researchers involved in major R&D projects exchanged insights and discussed their ongoing research initiatives.
An international professor remarked, “My understanding of NRF’s research programs for international researchers has broadened considerably. I am now more inclined to actively participate in projects organized by NRF in the future.”
Vice President Kim expressed her aspiration that the event would address the challenges faced by researchers and offer essential support to those engaged in research projects. “We will stay attuned to the needs of the research community and work towards creating a more supportive research environment,” said the VP.
Meanwhile, KAIST hosts a distinguished faculty comprising 134 professors from 22 countries and 71 researchers representing 23 nations, all contributing to groundbreaking academic achievements. Additionally, KAIST is home to over 1,000 international students from more than 100 countries, actively pursuing their studies. This diverse composition of global talent reinforces KAIST's position as a leading international hub for research and education.
2024.09.13 View 6461