Robotics
-
 International Undergraduate Conference ICISTS-KAIST 2015 and ICISTS-KAIST Public Colloquium Held on August 3, 2015 at KAIST
The ICISTS-KAIST 2015, an international conference organized by a student organization called the International Conference for the Integration of Science, Technology, and Society at KAIST, was held from August 3rd to 7th at the KAIST campus and ICC Hotel in Daejeon. This year’s conference theme was “Shaping the Future.” Over 300 undergraduate students from more than 20 countries joined the event. The conference offered opportunities to explore emerging issues in science and technology, particularly in the fields of robotics, medicine, and science communication.
Vitalic Buterin, a rising scientist who received the 2014 World Technology Award for his development of the Ethereum Project, and Alan Irwin, a renowned scholar in science communication at the Copenhagen Business School in Denmark, were invited as keynote speakers. The list of other speakers included Stefan Lorenz Sorgner, the Director and Co-founder of the Beyond Humanism Network; Wendell Wallach, a scholar at Yale University's Interdisciplinary Center for Bioethics; and Hideto Nakajima, a professor at the Department of History, Philosophy and Social Studies of Science and Technology at Tokyo Institute of Technology.
As part of the ICISTS-KAIST 2015, ICISTS also hosted a public colloquium on August 5, 2015 at the Science Hall in Daejeon National Science Museum. Ko San, the Director of TIDE Institute; Hyo-Joon Woo, the Chief Executive Officer of Fransen; and Dong-Il Jung, the Chief Executive Officer of iDrone participated as the speakers.
2015.07.29 View 9551
International Undergraduate Conference ICISTS-KAIST 2015 and ICISTS-KAIST Public Colloquium Held on August 3, 2015 at KAIST
The ICISTS-KAIST 2015, an international conference organized by a student organization called the International Conference for the Integration of Science, Technology, and Society at KAIST, was held from August 3rd to 7th at the KAIST campus and ICC Hotel in Daejeon. This year’s conference theme was “Shaping the Future.” Over 300 undergraduate students from more than 20 countries joined the event. The conference offered opportunities to explore emerging issues in science and technology, particularly in the fields of robotics, medicine, and science communication.
Vitalic Buterin, a rising scientist who received the 2014 World Technology Award for his development of the Ethereum Project, and Alan Irwin, a renowned scholar in science communication at the Copenhagen Business School in Denmark, were invited as keynote speakers. The list of other speakers included Stefan Lorenz Sorgner, the Director and Co-founder of the Beyond Humanism Network; Wendell Wallach, a scholar at Yale University's Interdisciplinary Center for Bioethics; and Hideto Nakajima, a professor at the Department of History, Philosophy and Social Studies of Science and Technology at Tokyo Institute of Technology.
As part of the ICISTS-KAIST 2015, ICISTS also hosted a public colloquium on August 5, 2015 at the Science Hall in Daejeon National Science Museum. Ko San, the Director of TIDE Institute; Hyo-Joon Woo, the Chief Executive Officer of Fransen; and Dong-Il Jung, the Chief Executive Officer of iDrone participated as the speakers.
2015.07.29 View 9551 -
 KAIST Undergraduates Organize the Largest Interdisciplinary Conference in Asia
The largest interdisciplinary conference in Asia hosted by KAIST undergraduates for students around the world will be held in KAIST. The organizing committee of International Conference for the Integration of Science, Technology and Society (ICISTS) will hold the ICISTS-KAIST 2015 in KAIST and Hotel ICC from August 3-7, 2015, with around 300 Korean and international participants.
ICISTS-KAIST was established in 2005 to provide an annual platform for students to discuss the integration and the convergence of science, technology and society, regardless of their academic background.
This year’s theme is "Shaping the Future" and the topics for the conference are robotics, medicine, and science communication.
The keynote speakers are Vitalic Buterin, the winner of the World Technology Award in 2014 for the co-creation and invention of Ethereum and Alan Irwin, a well-known scholar of science, technology and society as well as the Dean of Research at the Copenhagen Business School in Denmark.
Other notable speakers include Adam Marcus, a professor of Hematology and Medical Oncology, Emory University School of Medicine; Stefan Lorenz Sorgner, the Director and co-founder of Beyond Humanism Network; Hideto Nakajima, a professor in the Department of History, Philosophy and Social Studies of Science and Technology at Tokyo Institute of Technology; Wendell Wallach, a lecturer at the Yale University Interdisciplinary Center for Bioethics; Jinil Lee, a professor in the Division of Biological Science and Technology at Yonsei University; and Sangwook Kim, an editor of APCTP web journal Crossroads and a professor in the Department of Physics Education, Pusan National University.
Last year, more than 300 students from 50 different countries attended the ICISTS-KAIST 2014 as delegates to exchange their thoughts and ideas on science, technology, and society.
To register for the event, please visit www.icists.org.
2015.07.14 View 10291
KAIST Undergraduates Organize the Largest Interdisciplinary Conference in Asia
The largest interdisciplinary conference in Asia hosted by KAIST undergraduates for students around the world will be held in KAIST. The organizing committee of International Conference for the Integration of Science, Technology and Society (ICISTS) will hold the ICISTS-KAIST 2015 in KAIST and Hotel ICC from August 3-7, 2015, with around 300 Korean and international participants.
ICISTS-KAIST was established in 2005 to provide an annual platform for students to discuss the integration and the convergence of science, technology and society, regardless of their academic background.
This year’s theme is "Shaping the Future" and the topics for the conference are robotics, medicine, and science communication.
The keynote speakers are Vitalic Buterin, the winner of the World Technology Award in 2014 for the co-creation and invention of Ethereum and Alan Irwin, a well-known scholar of science, technology and society as well as the Dean of Research at the Copenhagen Business School in Denmark.
Other notable speakers include Adam Marcus, a professor of Hematology and Medical Oncology, Emory University School of Medicine; Stefan Lorenz Sorgner, the Director and co-founder of Beyond Humanism Network; Hideto Nakajima, a professor in the Department of History, Philosophy and Social Studies of Science and Technology at Tokyo Institute of Technology; Wendell Wallach, a lecturer at the Yale University Interdisciplinary Center for Bioethics; Jinil Lee, a professor in the Division of Biological Science and Technology at Yonsei University; and Sangwook Kim, an editor of APCTP web journal Crossroads and a professor in the Department of Physics Education, Pusan National University.
Last year, more than 300 students from 50 different countries attended the ICISTS-KAIST 2014 as delegates to exchange their thoughts and ideas on science, technology, and society.
To register for the event, please visit www.icists.org.
2015.07.14 View 10291 -
 BBC Feautres KAIST's Jellyfish Robot
Click, a weekly BBC television program covering news and recent developments in science and technology, introduced KAIST’s robotics project, JEROS, which has been conducted by Professor Hyun Myung of the Urban Robotics Lab (http://urobot.kaist.ac.kr/). JEROS is a robotics system that detects, captures, and removes jellyfish in the ocean. For the show, please click the link below:
BBC News, Click, June 2, 2015
The Robot Jellyfish Shredders
http://www.bbc.com/news/technology-32965841
2015.06.03 View 10763
BBC Feautres KAIST's Jellyfish Robot
Click, a weekly BBC television program covering news and recent developments in science and technology, introduced KAIST’s robotics project, JEROS, which has been conducted by Professor Hyun Myung of the Urban Robotics Lab (http://urobot.kaist.ac.kr/). JEROS is a robotics system that detects, captures, and removes jellyfish in the ocean. For the show, please click the link below:
BBC News, Click, June 2, 2015
The Robot Jellyfish Shredders
http://www.bbc.com/news/technology-32965841
2015.06.03 View 10763 -
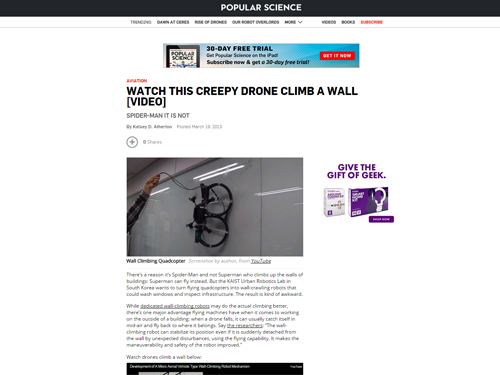 Wall Climbing Quadcopter by KAIST Urban Robotics Lab
Popular Science, an American monthly magazine devoted to general readers of science and technology, published “Watch This Creepy Drone Climb A Wall” online describing a drone that can fly and climb walls on March 19, 2015. The drone is the product of research conducted by Professor Hyun Myung of the Department of Civil and Environmental Engineering at KAIST. The flying quadcopters can turn into wall-crawling robots, or vice versa, when carrying out such assignments as cleaning windows or inspecting a building’s infrastructure. Professor Myung leads the KAIST Urban Robotics Lab (http://urobot.kaist.ac.kr/). For a link to the article, see http://www.popsci.com/watch-drone-climb-wall-video.
Another Popular Science article (posted on April 3, 2015), entitled “South Korea Gets Ready for Drone-on-Drone Warfare with North Korea,” describes a combat system of drones against hostile drones. Professor Hyunchul Shim of the Aerospace Engineering Department at KAIST developed the anti-drone system. He currently heads the Unmanned System Research Group, FDCL, http://unmanned.kaist.ac.kr/) and the Center of Field Robotics for Innovation, Exploration, aNd Defense (C-FRIEND).
2015.04.07 View 14221
Wall Climbing Quadcopter by KAIST Urban Robotics Lab
Popular Science, an American monthly magazine devoted to general readers of science and technology, published “Watch This Creepy Drone Climb A Wall” online describing a drone that can fly and climb walls on March 19, 2015. The drone is the product of research conducted by Professor Hyun Myung of the Department of Civil and Environmental Engineering at KAIST. The flying quadcopters can turn into wall-crawling robots, or vice versa, when carrying out such assignments as cleaning windows or inspecting a building’s infrastructure. Professor Myung leads the KAIST Urban Robotics Lab (http://urobot.kaist.ac.kr/). For a link to the article, see http://www.popsci.com/watch-drone-climb-wall-video.
Another Popular Science article (posted on April 3, 2015), entitled “South Korea Gets Ready for Drone-on-Drone Warfare with North Korea,” describes a combat system of drones against hostile drones. Professor Hyunchul Shim of the Aerospace Engineering Department at KAIST developed the anti-drone system. He currently heads the Unmanned System Research Group, FDCL, http://unmanned.kaist.ac.kr/) and the Center of Field Robotics for Innovation, Exploration, aNd Defense (C-FRIEND).
2015.04.07 View 14221 -
 Professor Rim Presents at IAEA Workshop in Vienna
Professor Chun-Taek Rim of the Department of Nuclear and Quantum Engineering at KAIST recently attended the International Atomic Energy Agency (IAEA)’s workshop on the Application of Wireless Technologies in Nuclear Power Plant Instrumentation and Control System. It took place on March 30-April 2, 2015, in Vienna, Austria.
Representing Korea, Professor Rim gave a talk entitled “Highly Reliable Wireless Power and Communications under Severe Accident of Nuclear Power Plants (NPPs).” About 20 industry experts from 12 countries such as AREVA (France), Westinghouse (US), Oak Ridge National Laboratory (US), Hitachi (Japan), and ENEA (Italy) joined the meeting.
The IAEA hosted the workshop to explore the application of wireless technology for the operation and management of NPPs. It formed a committee consisting of eminent professionals worldwide in NPP instrumentation and control systems, communications, and nuclear power to examine this issue in-depth and to conduct various research projects for the next three years.
In particular, the committee will concentrate its research on improving the reliability and safety of using wireless technology, not only in the normal operation of nuclear plants but also in extreme conditions such as the Fukushima Daiichi nuclear accident. The complementation, economic feasibility, and standardization of NPPs when applying wireless technology will be also discussed.
Professor Rim currently leads the Nuclear Power Electronics
and Robotics Lab at KAIST (http://tesla.kaist.ac.kr/index_eng.php?lag=eng).
Picture 1: Professors Rim presents his topic at the IAEA Workshop in Vienna.
Picture 2: The IAEA Workshop Participants
2015.04.07 View 15198
Professor Rim Presents at IAEA Workshop in Vienna
Professor Chun-Taek Rim of the Department of Nuclear and Quantum Engineering at KAIST recently attended the International Atomic Energy Agency (IAEA)’s workshop on the Application of Wireless Technologies in Nuclear Power Plant Instrumentation and Control System. It took place on March 30-April 2, 2015, in Vienna, Austria.
Representing Korea, Professor Rim gave a talk entitled “Highly Reliable Wireless Power and Communications under Severe Accident of Nuclear Power Plants (NPPs).” About 20 industry experts from 12 countries such as AREVA (France), Westinghouse (US), Oak Ridge National Laboratory (US), Hitachi (Japan), and ENEA (Italy) joined the meeting.
The IAEA hosted the workshop to explore the application of wireless technology for the operation and management of NPPs. It formed a committee consisting of eminent professionals worldwide in NPP instrumentation and control systems, communications, and nuclear power to examine this issue in-depth and to conduct various research projects for the next three years.
In particular, the committee will concentrate its research on improving the reliability and safety of using wireless technology, not only in the normal operation of nuclear plants but also in extreme conditions such as the Fukushima Daiichi nuclear accident. The complementation, economic feasibility, and standardization of NPPs when applying wireless technology will be also discussed.
Professor Rim currently leads the Nuclear Power Electronics
and Robotics Lab at KAIST (http://tesla.kaist.ac.kr/index_eng.php?lag=eng).
Picture 1: Professors Rim presents his topic at the IAEA Workshop in Vienna.
Picture 2: The IAEA Workshop Participants
2015.04.07 View 15198 -
 KAIST wins second place in unmanned boat competition
KAIST took second place in an international competition to promote technologies of the autonomous underwater vehicle (AUV).
Professor Jin-hwan Kim’s research team from KAIST’s Ocean Systems Engineering Department won the second place in Maritime RobotX Challenge which took place for the first time from October 20 - 26 in Marina Bay, Singapore.
Along with automobiles and drones, the necessity for unmanned boats has grown. To encourage and examine the development of these technologies, the U.S. Office of Naval Research decided to organize an unmanned boat competition which took place for the first time this year.
After three teams were selected from a domestic competition in each countries, a total of fifteen teams from five countries from the Pacific Rim including Korea, the United States, Australia, Japan, and Singapore competed. Teams from such universities as MIT, Tokyo University, Tokyo Institute of Technology, National University of Singapore, Nanyang Technological University, and Queensland University of Technology participated. In addition to KAIST, Seoul National University and Ulsan University participated.
Using a 4.5 meters long and 2.5 meters wide unmanned boat provided by the organizer, each team had to implement an integrated system that combined a propulsion system, hardware, and autonomous software. Each team’s vessel had to perform tasks without manual control, employing autonomous driving through recognition of the course, searching underwater for acoustic sources, automatically approaching piers, remote observation of buoy, and avoidance and detection of obstacles.
Although KAIST outpaced MIT in the semifinal which selected six out of fifteen teams, it won the second place in the final. As well as winning second prize, KAIST also won best website prize and a special prize from the competition sponsor, Northrop Grumman Corporation, an American defense technology company, totaling 16,500 U.S. dollars of prize money.
The Vice President for Planning and Budget, Professor Seungbin Park said, “It was a great opportunity to showcase the advanced unmanned robot technology of Korea.” He added that “this raised KAIST’s reputation as a global research oriented university.”
Professor Kim commented, “Along with automobiles and drones, the necessity for the development of unmanned ocean vehicles such as unmanned boats and submarines are recognized these days.” He added that “the use of unmanned boats will make the process of channel investigation, ocean exploration, surveillance over water territories safer and more effective.”
Professor Kim’s team was sponsored by the U.S. Office of Naval Research, Samsung Heavy Industries, Sonar Tech, Daeyang Electric, and Red-one Technology.
KAIST Team's Unmanned Boat
The Competition's Missions
2014.12.12 View 14025
KAIST wins second place in unmanned boat competition
KAIST took second place in an international competition to promote technologies of the autonomous underwater vehicle (AUV).
Professor Jin-hwan Kim’s research team from KAIST’s Ocean Systems Engineering Department won the second place in Maritime RobotX Challenge which took place for the first time from October 20 - 26 in Marina Bay, Singapore.
Along with automobiles and drones, the necessity for unmanned boats has grown. To encourage and examine the development of these technologies, the U.S. Office of Naval Research decided to organize an unmanned boat competition which took place for the first time this year.
After three teams were selected from a domestic competition in each countries, a total of fifteen teams from five countries from the Pacific Rim including Korea, the United States, Australia, Japan, and Singapore competed. Teams from such universities as MIT, Tokyo University, Tokyo Institute of Technology, National University of Singapore, Nanyang Technological University, and Queensland University of Technology participated. In addition to KAIST, Seoul National University and Ulsan University participated.
Using a 4.5 meters long and 2.5 meters wide unmanned boat provided by the organizer, each team had to implement an integrated system that combined a propulsion system, hardware, and autonomous software. Each team’s vessel had to perform tasks without manual control, employing autonomous driving through recognition of the course, searching underwater for acoustic sources, automatically approaching piers, remote observation of buoy, and avoidance and detection of obstacles.
Although KAIST outpaced MIT in the semifinal which selected six out of fifteen teams, it won the second place in the final. As well as winning second prize, KAIST also won best website prize and a special prize from the competition sponsor, Northrop Grumman Corporation, an American defense technology company, totaling 16,500 U.S. dollars of prize money.
The Vice President for Planning and Budget, Professor Seungbin Park said, “It was a great opportunity to showcase the advanced unmanned robot technology of Korea.” He added that “this raised KAIST’s reputation as a global research oriented university.”
Professor Kim commented, “Along with automobiles and drones, the necessity for the development of unmanned ocean vehicles such as unmanned boats and submarines are recognized these days.” He added that “the use of unmanned boats will make the process of channel investigation, ocean exploration, surveillance over water territories safer and more effective.”
Professor Kim’s team was sponsored by the U.S. Office of Naval Research, Samsung Heavy Industries, Sonar Tech, Daeyang Electric, and Red-one Technology.
KAIST Team's Unmanned Boat
The Competition's Missions
2014.12.12 View 14025 -
 JEROS, a jellyfish exterminating robot, appears in a US business and technology news
Business Insider, a US business and technology news website launched in 2006 and based in New York City, published a story about JEROS, a robot that disposes of ever-increasing jellyfish in the ocean.
JEROS was the brainchild of Professor Hyun Myung at the Department of Civil and Environmental Engineering, KAIST. It can shred almost one tons worth of jellyfish per hour.
For the story, please visit the following link:
Business Insider, June 24, 2014
“These Jellyfish-Killing Robots Could Save the Fishing Industry Billions Per Year”
http://www.businessinsider.com/jellyfish-killing-robot-2014-6
JEROS in action
2014.06.26 View 10571
JEROS, a jellyfish exterminating robot, appears in a US business and technology news
Business Insider, a US business and technology news website launched in 2006 and based in New York City, published a story about JEROS, a robot that disposes of ever-increasing jellyfish in the ocean.
JEROS was the brainchild of Professor Hyun Myung at the Department of Civil and Environmental Engineering, KAIST. It can shred almost one tons worth of jellyfish per hour.
For the story, please visit the following link:
Business Insider, June 24, 2014
“These Jellyfish-Killing Robots Could Save the Fishing Industry Billions Per Year”
http://www.businessinsider.com/jellyfish-killing-robot-2014-6
JEROS in action
2014.06.26 View 10571 -
 Jellyfish Exterminator Robot Developed
Formation Control demonstrated by JEROS
- Trial performance successfully completed with three assembly robots -
A team led by KAIST Civil and Environmental Engineering Department’s Professor Hyeon Myeong has just finished testing the cooperative assembly robot for jellyfish population control, named JEROS, in the field.
The rising number of accidents and financial losses by fishing industry, estimated at 300 billion won per year, caused by the recent swarm of jellyfish in coastal waters has been a major problem for many years. The research team led by Prof. Hyeon Myeong began developing an unmanned automated system capable of eradicating jellyfishin in 2009, and has since completed field-tests last year with success.
This year, JEROS’s performance and speed has been improved with the ability to work in formation as a cooperative group to efficiently exterminate jellyfish.
An unmanned aquatic robot JEROS with a mountable grinding part is buoyed by two cylindrical bodies that utilizes propulsion motors to move forward and reverse, as well as rotate 360 degrees. Furthermore, GIS (geographic information system)-based map data is used to specify the region for jellyfish extermination, which automatically calculates the path for the task. JEROS then navigates autonomously using a GPS (Global Positioning System) receiver and an INS(inertial navigation system).
The assembly robots maintain a set formation pattern, while calculating its course to perform jellyfish extermination. The advantage of this method is that there is no need for individual control of the robots. Only the leader robot requires the calculated path, and the other robots can simply follow in a formation by exchanging their location information via wireless communication (ZigBee method).
JEROS uses its propulsion speed to capture jellyfish into the grinding part on the bottom, which then suctions the jellyfish toward the propeller to be exterminated.
The field test results show that three assembly robots operating at 4 knots (7.2km/h) disposes jellyfish at the rate of about 900kg/h.
The research team has currently completed testing JEROS at Gyeongnam Masan Bay and is expected to further experiment and improve the performance at various environment and conditions.
JEROS may also be utilized for other purposes including marine patrols, prevention of oil spills and waste removal in the sea.
JEROS research has been funded by Ministry of Science, ICT and Future Planning and Ministry of Trade, Industry and Energy.
2013.09.27 View 18613
Jellyfish Exterminator Robot Developed
Formation Control demonstrated by JEROS
- Trial performance successfully completed with three assembly robots -
A team led by KAIST Civil and Environmental Engineering Department’s Professor Hyeon Myeong has just finished testing the cooperative assembly robot for jellyfish population control, named JEROS, in the field.
The rising number of accidents and financial losses by fishing industry, estimated at 300 billion won per year, caused by the recent swarm of jellyfish in coastal waters has been a major problem for many years. The research team led by Prof. Hyeon Myeong began developing an unmanned automated system capable of eradicating jellyfishin in 2009, and has since completed field-tests last year with success.
This year, JEROS’s performance and speed has been improved with the ability to work in formation as a cooperative group to efficiently exterminate jellyfish.
An unmanned aquatic robot JEROS with a mountable grinding part is buoyed by two cylindrical bodies that utilizes propulsion motors to move forward and reverse, as well as rotate 360 degrees. Furthermore, GIS (geographic information system)-based map data is used to specify the region for jellyfish extermination, which automatically calculates the path for the task. JEROS then navigates autonomously using a GPS (Global Positioning System) receiver and an INS(inertial navigation system).
The assembly robots maintain a set formation pattern, while calculating its course to perform jellyfish extermination. The advantage of this method is that there is no need for individual control of the robots. Only the leader robot requires the calculated path, and the other robots can simply follow in a formation by exchanging their location information via wireless communication (ZigBee method).
JEROS uses its propulsion speed to capture jellyfish into the grinding part on the bottom, which then suctions the jellyfish toward the propeller to be exterminated.
The field test results show that three assembly robots operating at 4 knots (7.2km/h) disposes jellyfish at the rate of about 900kg/h.
The research team has currently completed testing JEROS at Gyeongnam Masan Bay and is expected to further experiment and improve the performance at various environment and conditions.
JEROS may also be utilized for other purposes including marine patrols, prevention of oil spills and waste removal in the sea.
JEROS research has been funded by Ministry of Science, ICT and Future Planning and Ministry of Trade, Industry and Energy.
2013.09.27 View 18613 -
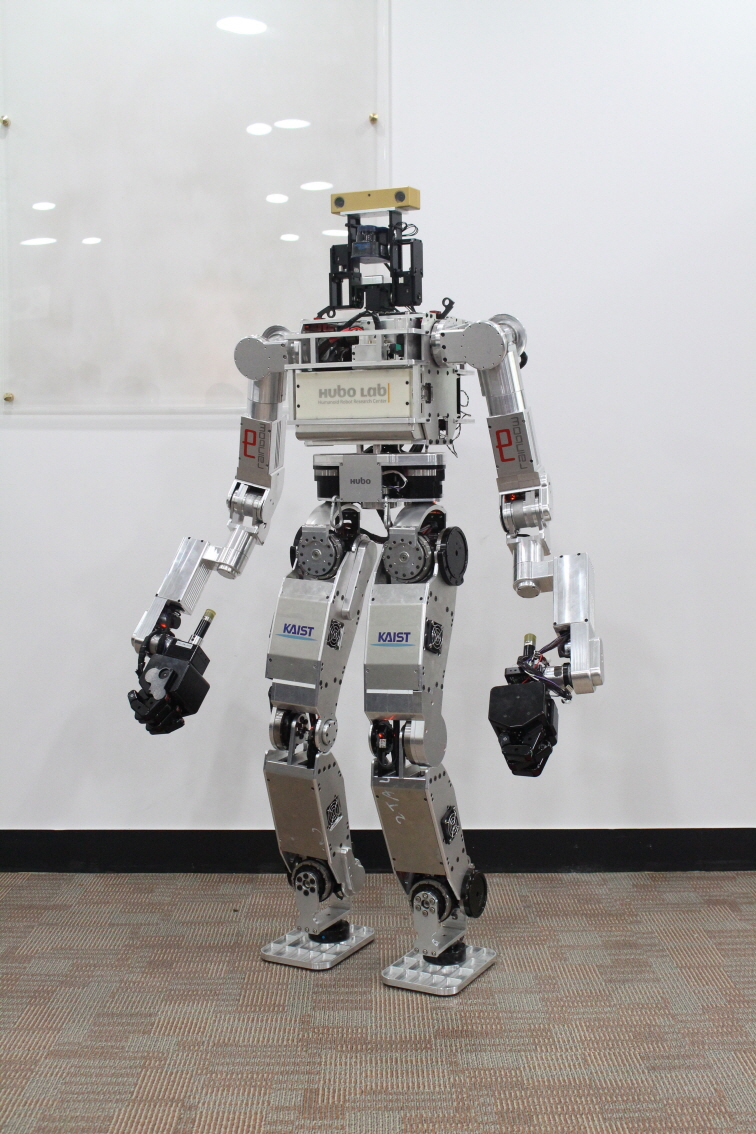 KAIST's HUBO Ready for DARPA's Robotics Challenge Trials
When walking on muddy or bumpy roads, the two arms of DRC-HUBO become extra legs, enabling stable and agile movements.
The Humanoid Robot Research Center (HUBO Lab, http://hubolab.kaist.ac.kr) at the Korea Advanced Institute of Science and Technology (KAIST) and Rainbow Co., a spin-off venture company of the university, unveiled a new model of HUBO that will be entered in an international robotics competition scheduled later this year.
The competition is hosted and sponsored by the US Defense Advanced Research Projects Agency (DARPA), which is called the DARPA Robotics Challenge (DRC). Kicked off in October 2012, the DRC’s goal is to spur the development of advanced robots that can assist humans in mitigating and recovering from future natural and man-made disasters.
KAIST’s humanoid robot, HUBO, was originally created by Jun-Ho Oh, a distinguished professor of the Department of Mechanical Engineering, in 2004. Since then, the robot has gone through technological advancements, with the latest version of HUBO II released in 2012. So far, 12 HUBOs have been exported for further studies in robotics to universities, research institutes, and private companies in the US, China, and Singapore.
In tandem with Rainbow Co. (www.rainbow-robot.com), Professor Oh and his research team recently developed DRC-HUBO, which will compete as Team DRC-HUBO led by Drexel University at the DRC trials to be held in December 2013. Team DRC-HUBO is consisted of KAIST and nine US institutions.
DRC-HUBO is designed to perform difficult but essential activities required when responding to disaster scenes. The robot will have to fulfill eight tasks assigned by the DRC at the upcoming event such as driving a utility vehicle, walking across rough terrain, climbing a ladder, and using hand tools.
Unlike the previous models of HUBO, DRC-HUBO boasts several distinctive, enhanced features. Chief among them is the way the robot interacts with the external environment. Without complex sensors installed throughout the body, DRC-HUBO can control each joint of the arms and legs in compliance with the dynamics dictated by the external environment.
For example, when DRC-HUBO is faced with a rock falling from above while climbing up a ladder, the robot’s arms and legs naturally give in to the force of external changes. Accordingly, as the robot dodges the rock, its body and joints smoothly sway to absorb shock so that the fingers can keep a tight grip on the ladder, and the feet are planted firmly on the rail of the ladder, not losing balance.
In addition, DRC-HUBO can switch from bipedal to quadrupedal walking and vice versa. This provides the robot with greater stability to walk on uneven terrain or to climb up a hill. The robot’s arms and legs are elongated to better meet the challenges demanded by the DRC competition. DRC-HUBO’s two arms swing back and forth to form legs when necessary, thereby walking freely backwards and forwards.
The robot has gotten stronger grip as well. The right hand has four fingers (with one triggering finger that operates independently from the other three fingers), and the left hand has three fingers. All three fingers on both hands are actuated synchronously for gripping. The fingers are sophisticated enough to steer the wheel of a vehicle or grab a ladder to climb up, and strong enough to hold 15 lbs in one hand.
“With a full 34 degrees of freedom (DOF), DRC-HUBO stands 4.7 ft tall and weighs 120 lbs. All in all, the robot has been improved and extensively refurbished from the past models of HUBOs to compete at the DRC Trials. It has better vision and coordination. The legs and arms have become stronger,” said Professor Oh.
“Although the robot is still a prototype, it has important capabilities that can be utilized in advancing humanoid robots in general. One example is the way its arms can be used as extra legs to support the robot’s body, offering more flexibility in providing aid to humans.”
2013.07.25 View 16457
KAIST's HUBO Ready for DARPA's Robotics Challenge Trials
When walking on muddy or bumpy roads, the two arms of DRC-HUBO become extra legs, enabling stable and agile movements.
The Humanoid Robot Research Center (HUBO Lab, http://hubolab.kaist.ac.kr) at the Korea Advanced Institute of Science and Technology (KAIST) and Rainbow Co., a spin-off venture company of the university, unveiled a new model of HUBO that will be entered in an international robotics competition scheduled later this year.
The competition is hosted and sponsored by the US Defense Advanced Research Projects Agency (DARPA), which is called the DARPA Robotics Challenge (DRC). Kicked off in October 2012, the DRC’s goal is to spur the development of advanced robots that can assist humans in mitigating and recovering from future natural and man-made disasters.
KAIST’s humanoid robot, HUBO, was originally created by Jun-Ho Oh, a distinguished professor of the Department of Mechanical Engineering, in 2004. Since then, the robot has gone through technological advancements, with the latest version of HUBO II released in 2012. So far, 12 HUBOs have been exported for further studies in robotics to universities, research institutes, and private companies in the US, China, and Singapore.
In tandem with Rainbow Co. (www.rainbow-robot.com), Professor Oh and his research team recently developed DRC-HUBO, which will compete as Team DRC-HUBO led by Drexel University at the DRC trials to be held in December 2013. Team DRC-HUBO is consisted of KAIST and nine US institutions.
DRC-HUBO is designed to perform difficult but essential activities required when responding to disaster scenes. The robot will have to fulfill eight tasks assigned by the DRC at the upcoming event such as driving a utility vehicle, walking across rough terrain, climbing a ladder, and using hand tools.
Unlike the previous models of HUBO, DRC-HUBO boasts several distinctive, enhanced features. Chief among them is the way the robot interacts with the external environment. Without complex sensors installed throughout the body, DRC-HUBO can control each joint of the arms and legs in compliance with the dynamics dictated by the external environment.
For example, when DRC-HUBO is faced with a rock falling from above while climbing up a ladder, the robot’s arms and legs naturally give in to the force of external changes. Accordingly, as the robot dodges the rock, its body and joints smoothly sway to absorb shock so that the fingers can keep a tight grip on the ladder, and the feet are planted firmly on the rail of the ladder, not losing balance.
In addition, DRC-HUBO can switch from bipedal to quadrupedal walking and vice versa. This provides the robot with greater stability to walk on uneven terrain or to climb up a hill. The robot’s arms and legs are elongated to better meet the challenges demanded by the DRC competition. DRC-HUBO’s two arms swing back and forth to form legs when necessary, thereby walking freely backwards and forwards.
The robot has gotten stronger grip as well. The right hand has four fingers (with one triggering finger that operates independently from the other three fingers), and the left hand has three fingers. All three fingers on both hands are actuated synchronously for gripping. The fingers are sophisticated enough to steer the wheel of a vehicle or grab a ladder to climb up, and strong enough to hold 15 lbs in one hand.
“With a full 34 degrees of freedom (DOF), DRC-HUBO stands 4.7 ft tall and weighs 120 lbs. All in all, the robot has been improved and extensively refurbished from the past models of HUBOs to compete at the DRC Trials. It has better vision and coordination. The legs and arms have become stronger,” said Professor Oh.
“Although the robot is still a prototype, it has important capabilities that can be utilized in advancing humanoid robots in general. One example is the way its arms can be used as extra legs to support the robot’s body, offering more flexibility in providing aid to humans.”
2013.07.25 View 16457 -
 Jellyfish removal robot developed
Professor Myung Hyun’s research team from the Department of Civil and Environmental Engineering at KAIST has developed a jellyfish removal robot named ‘JEROS’ (JEROS: Jellyfish Elimination RObotic Swarm).
With jellyfish attacks around the south-west coast of Korea becoming a serious problem, causing deaths and operational losses (around 3 billion won a year), Professor Myung’s team started the development of this unmanned automatic jellyfish removal system 3 years ago.
JEROS floats on the surface of the water using two long cylindrical bodies. Motors are attached to the bodies such that the robot can move back and forth as well as rotate on water. A camera and GPS system allows the JEROS to detect jellyfish swarm as well as plan and calculate its work path relative to its position.
The jellyfish are removed by a submerged net that sucks them up using the velocity created by the unmanned sailing. Once caught, the jellyfish are pulverized using a special propeller.
JEROS is estimated to be 3 times more economical than manual removal. Upon experimentation, it showed a removal rate of 400kg per hour at 6 knots. To reach similar effectiveness as manual net removal, which removes up to 1 ton per hour, the research team designed the robot such that 3 or more individual robots could be grouped together and controlled as one.
The research team has finished conducting removal tests in Gunsan and Masan and plan to commercialize the robot next April after improving the removal technology. JEROS technology can also be used for a wide range of purposes such as patrolling and guarding, preventing oil spills or removing floating waste. This research was funded by the Ministry of Education, Science and Technology since 2010.
2012.08.29 View 14402
Jellyfish removal robot developed
Professor Myung Hyun’s research team from the Department of Civil and Environmental Engineering at KAIST has developed a jellyfish removal robot named ‘JEROS’ (JEROS: Jellyfish Elimination RObotic Swarm).
With jellyfish attacks around the south-west coast of Korea becoming a serious problem, causing deaths and operational losses (around 3 billion won a year), Professor Myung’s team started the development of this unmanned automatic jellyfish removal system 3 years ago.
JEROS floats on the surface of the water using two long cylindrical bodies. Motors are attached to the bodies such that the robot can move back and forth as well as rotate on water. A camera and GPS system allows the JEROS to detect jellyfish swarm as well as plan and calculate its work path relative to its position.
The jellyfish are removed by a submerged net that sucks them up using the velocity created by the unmanned sailing. Once caught, the jellyfish are pulverized using a special propeller.
JEROS is estimated to be 3 times more economical than manual removal. Upon experimentation, it showed a removal rate of 400kg per hour at 6 knots. To reach similar effectiveness as manual net removal, which removes up to 1 ton per hour, the research team designed the robot such that 3 or more individual robots could be grouped together and controlled as one.
The research team has finished conducting removal tests in Gunsan and Masan and plan to commercialize the robot next April after improving the removal technology. JEROS technology can also be used for a wide range of purposes such as patrolling and guarding, preventing oil spills or removing floating waste. This research was funded by the Ministry of Education, Science and Technology since 2010.
2012.08.29 View 14402