-
 'Team Atlanta', in which KAIST Professor Insu Yun research team participated, won the DARPA AI Cyber Challenge in the US, with a prize of 5.5 billion KRW
<Photo1. Group Photo of Team Atlanta>
Team Atlanta, led by Professor Insu Yun of the Department of Electrical and Electronic Engineering at KAIST and Tae-soo Kim, an executive from Samsung Research, along with researchers from POSTECH and Georgia Tech, won the final championship at the AI Cyber Challenge (AIxCC) hosted by the Defense Advanced Research Projects Agency (DARPA). The final was held at the world's largest hacking conference, DEF CON 33, in Las Vegas on August 8 (local time).
With this achievement, the team won a prize of $4 million (approximately 5.5 billion KRW), demonstrating the excellence of their AI-based autonomous cyber defense technology on the global stage.
<Photo2.Championship Commemorative:On the left and right are tournament officials. From the second person, Professor Tae-soo Kim(Samsung Research / Georgia Tech), Researcher Hyeong-seok Han (Samsung Research America), and Professor Insu Yun (KAIST)>
The AI Cyber Challenge is a two-year global competition co-hosted by DARPA and the Advanced Research Projects Agency for Health (ARPA-H). It challenges contestants to automatically analyze, detect, and fix software vulnerabilities using AI-based Cyber Reasoning Systems (CRS). The total prize money for the competition is $29.5 million, with the winning team receiving $4 million.
In the final, Team Atlanta scored a total of 392.76 points, a difference of over 170 points from the second-place team, Trail of Bits, securing a dominant victory. The CRS developed by Team Atlanta successfully and automatically detected various types of vulnerabilities and patched a significant number of them in real time.
Among the 7 finalist teams, an average of 77% of the 70 intentionally injected vulnerabilities were found, and 61% of them were patched. The teams also found 18 additional unknown vulnerabilities in real software, proving the potential of AI security technology.
All CRS technologies, including those of the winning team, will be provided as open-source and are expected to be used to strengthen the security of core infrastructure such as hospitals, water, and power systems.
<Photo3. Final Scoreboard: An overwhelming victory with over 170 points>
Professor Insu Yun of KAIST, a member of Team Atlanta, stated, "I am very happy to have achieved such a great result. This is a remarkable achievement that shows Korea's cyber security research has reached the highest level in the world, and it was meaningful to show the capabilities of Korean researchers on the world stage. I will continue to conduct research to protect the digital safety of the nation and global society through the fusion of AI and security technology."
KAIST President Kwang-hyung Lee stated, "This victory is another example that proves KAIST is a world-leading institution in the field of future cyber security and AI convergence. We will continue to provide full support to our researchers so they can compete and produce results on the world stage."
<Photo4. Results Announcement>
2025.08.10 View 154
'Team Atlanta', in which KAIST Professor Insu Yun research team participated, won the DARPA AI Cyber Challenge in the US, with a prize of 5.5 billion KRW
<Photo1. Group Photo of Team Atlanta>
Team Atlanta, led by Professor Insu Yun of the Department of Electrical and Electronic Engineering at KAIST and Tae-soo Kim, an executive from Samsung Research, along with researchers from POSTECH and Georgia Tech, won the final championship at the AI Cyber Challenge (AIxCC) hosted by the Defense Advanced Research Projects Agency (DARPA). The final was held at the world's largest hacking conference, DEF CON 33, in Las Vegas on August 8 (local time).
With this achievement, the team won a prize of $4 million (approximately 5.5 billion KRW), demonstrating the excellence of their AI-based autonomous cyber defense technology on the global stage.
<Photo2.Championship Commemorative:On the left and right are tournament officials. From the second person, Professor Tae-soo Kim(Samsung Research / Georgia Tech), Researcher Hyeong-seok Han (Samsung Research America), and Professor Insu Yun (KAIST)>
The AI Cyber Challenge is a two-year global competition co-hosted by DARPA and the Advanced Research Projects Agency for Health (ARPA-H). It challenges contestants to automatically analyze, detect, and fix software vulnerabilities using AI-based Cyber Reasoning Systems (CRS). The total prize money for the competition is $29.5 million, with the winning team receiving $4 million.
In the final, Team Atlanta scored a total of 392.76 points, a difference of over 170 points from the second-place team, Trail of Bits, securing a dominant victory. The CRS developed by Team Atlanta successfully and automatically detected various types of vulnerabilities and patched a significant number of them in real time.
Among the 7 finalist teams, an average of 77% of the 70 intentionally injected vulnerabilities were found, and 61% of them were patched. The teams also found 18 additional unknown vulnerabilities in real software, proving the potential of AI security technology.
All CRS technologies, including those of the winning team, will be provided as open-source and are expected to be used to strengthen the security of core infrastructure such as hospitals, water, and power systems.
<Photo3. Final Scoreboard: An overwhelming victory with over 170 points>
Professor Insu Yun of KAIST, a member of Team Atlanta, stated, "I am very happy to have achieved such a great result. This is a remarkable achievement that shows Korea's cyber security research has reached the highest level in the world, and it was meaningful to show the capabilities of Korean researchers on the world stage. I will continue to conduct research to protect the digital safety of the nation and global society through the fusion of AI and security technology."
KAIST President Kwang-hyung Lee stated, "This victory is another example that proves KAIST is a world-leading institution in the field of future cyber security and AI convergence. We will continue to provide full support to our researchers so they can compete and produce results on the world stage."
<Photo4. Results Announcement>
2025.08.10 View 154 -
 Prof. Seungbum Koo’s Team Receives Clinical Biomechanics Award at the 30th International Society of Biomechanics Conference
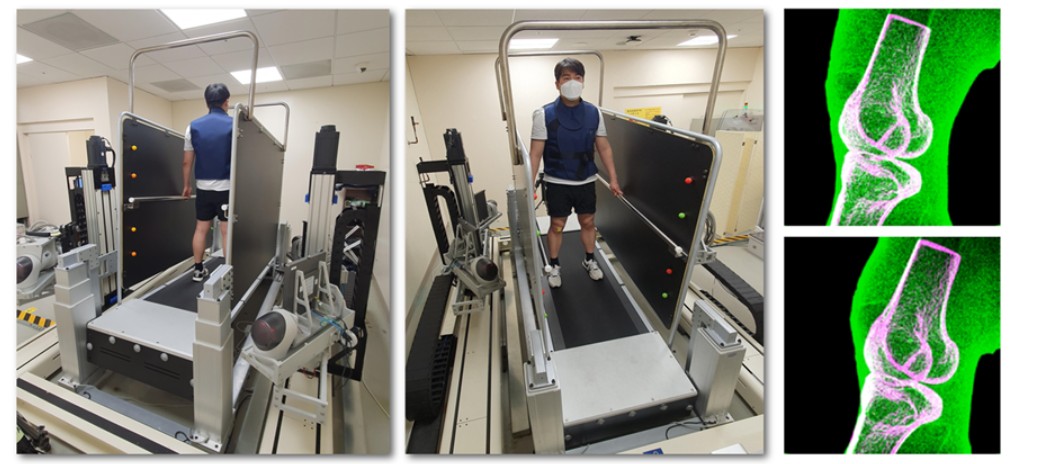
<(From Left) Ph.D candidate Jeongseok Oh from KAIST, Dr. Seungwoo Yoon from KAIST, Prof.Joon-Ho Wang from Samsung Medical Center, Prof.Seungbum Koo from KAIST>
Professor Seungbum Koo’s research team received the Clinical Biomechanics Award at the 30th International Society of Biomechanics (ISB) Conference, held in July 2025 in Stockholm, Sweden. The Plenary Lecture was delivered by first author and Ph.D. candidate Jeongseok Oh. This research was conducted in collaboration with Professor Joon-Ho Wang’s team at Samsung Medical Center.
Residual Translational and Rotational Kinematics After Combined ACL and Anterolateral Ligament Reconstruction During Walking
Jeongseok Oh, Seungwoo Yoon, Joon-Ho Wang, Seungbum Koo
The study analyzed gait-related knee joint motion using high-speed biplane X-ray imaging and three-dimensional kinematic reconstruction in 10 healthy individuals and 10 patients who underwent ACL reconstruction with ALL augmentation. The patient group showed excessive anterior translation and internal rotation, suggesting incomplete restoration of normal joint kinematics post-surgery. These findings provide mechanistic insight into the early onset of knee osteoarthritis often reported in this population.'
The ISB conference, held biennially for over 60 years, is the largest international biomechanics meeting. This year, it hosted 1,600 researchers from 46 countries and featured over 1,400 presentations. The Clinical Biomechanics Award is given to one outstanding study selected from five top-rated abstracts invited for full manuscript review. The winning paper is published in Clinical Biomechanics, and the award includes a monetary prize and a Plenary Lecture opportunity.
From 2019 to 2023, Koo and Wang’s teams developed a system with support from the Samsung Future Technology Development Program to track knee motion in real time during treadmill walking, using high-speed biplane X-rays and custom three-dimensional reconstruction software. This system, along with proprietary software that precisely reconstructs the three-dimensional motion of joints, was approved for clinical trials by the Ministry of Food and Drug Safety and installed at Samsung Medical Center. It is being used to quantitatively analyze abnormal joint motion patterns in patients with knee ligament injuries and those who have undergone knee surgery.
Additionally, Jeongseok Oh was named one of five finalists for the David Winter Young Investigator Award, presenting his work during the award session. This award recognizes promising young researchers in biomechanics worldwide.
2025.08.10 View 101
Prof. Seungbum Koo’s Team Receives Clinical Biomechanics Award at the 30th International Society of Biomechanics Conference
<(From Left) Ph.D candidate Jeongseok Oh from KAIST, Dr. Seungwoo Yoon from KAIST, Prof.Joon-Ho Wang from Samsung Medical Center, Prof.Seungbum Koo from KAIST>
Professor Seungbum Koo’s research team received the Clinical Biomechanics Award at the 30th International Society of Biomechanics (ISB) Conference, held in July 2025 in Stockholm, Sweden. The Plenary Lecture was delivered by first author and Ph.D. candidate Jeongseok Oh. This research was conducted in collaboration with Professor Joon-Ho Wang’s team at Samsung Medical Center.
Residual Translational and Rotational Kinematics After Combined ACL and Anterolateral Ligament Reconstruction During Walking
Jeongseok Oh, Seungwoo Yoon, Joon-Ho Wang, Seungbum Koo
The study analyzed gait-related knee joint motion using high-speed biplane X-ray imaging and three-dimensional kinematic reconstruction in 10 healthy individuals and 10 patients who underwent ACL reconstruction with ALL augmentation. The patient group showed excessive anterior translation and internal rotation, suggesting incomplete restoration of normal joint kinematics post-surgery. These findings provide mechanistic insight into the early onset of knee osteoarthritis often reported in this population.'
The ISB conference, held biennially for over 60 years, is the largest international biomechanics meeting. This year, it hosted 1,600 researchers from 46 countries and featured over 1,400 presentations. The Clinical Biomechanics Award is given to one outstanding study selected from five top-rated abstracts invited for full manuscript review. The winning paper is published in Clinical Biomechanics, and the award includes a monetary prize and a Plenary Lecture opportunity.
From 2019 to 2023, Koo and Wang’s teams developed a system with support from the Samsung Future Technology Development Program to track knee motion in real time during treadmill walking, using high-speed biplane X-rays and custom three-dimensional reconstruction software. This system, along with proprietary software that precisely reconstructs the three-dimensional motion of joints, was approved for clinical trials by the Ministry of Food and Drug Safety and installed at Samsung Medical Center. It is being used to quantitatively analyze abnormal joint motion patterns in patients with knee ligament injuries and those who have undergone knee surgery.
Additionally, Jeongseok Oh was named one of five finalists for the David Winter Young Investigator Award, presenting his work during the award session. This award recognizes promising young researchers in biomechanics worldwide.
2025.08.10 View 101 -
 KAIST’s Wearable Robot Design Wins ‘2025 Red Dot Award Best of the Best’
<Professor Hyunjoon Park, M.S candidate Eun-ju Kang, Prospective M.S candidate Jae-seong Kim, undergraduate student Min-su Kim>
A team led by Professor Hyunjoon Park from the Department of Industrial Design won the ‘Best of the Best’ award at the 2025 Red Dot Design Awards, one of the world's top three design awards, for their 'Angel Robotics WSF1 VISION Concept.'
The design for the next-generation wearable robot for people with paraplegia successfully implements functionality, aesthetics, and social inclusion. This latest achievement follows the team's iF Design Award win for the WalkON Suit F1 prototype, which also won a gold medal at the Cybathlon last year. This marks consecutive wins at top-tier international design awards.
KAIST (President Kwang-hyung Lee) announced on the 8th of August that Move Lab, a research team led by Professor Hyunjoon Park from the Department of Industrial Design, won the 'Best of the Best' award in the Design Concept-Professional category at the prestigious '2025 Red Dot Design Awards' for their next-generation wearable robot design, the ‘Angel Robotics WSF1 VISION Concept.’
The German 'Red Dot Design Awards' is one of the world's most well-known design competitions. It is considered one of the world's top three design awards along with Germany’s iF Design Awards and America’s IDEA. The ‘Best of the Best’ award is given to the best design in a category and is awarded only to a very select few of the top designs (within the top 1%) among all Red Dot Award winners.
Professor Hyunjoon Park’s team was honored with the ‘Best of the Best’ award for a user-friendly follow-up development of the ‘WalkON Suit F1 prototype,’ which won a gold medal at the 2024 Cybathlon and an iF Design Award in 2025.
<Figure 1. WSF1 Vision Concept Main Image>
This award-winning design is the result of industry-academic cooperation with Angel Robotics Inc., founded by Professor Kyoungchul Kong from the KAIST Department of Mechanical Engineering. It is a concept design that proposes a next-generation wearable robot (an ultra-personal mobility device) that can be used by people with paraplegia in their daily lives.
The research team focused on transforming Angel Robotics Inc.'s advanced engineering platform into an intuitive and emotional, user-centric experience, implementing a design solution that simultaneously possesses functionality, aesthetics, and social inclusion.
<Figure 2. WSF1 Vision Concept Full Exterior (Front View)>
The WSF1 VISION Concept includes innovative features implemented in Professor Kyoungchul Kong’s Exo Lab, such as:
An autonomous access function where the robot finds the user on its own.
A front-loading mechanism designed for the user to put it on alone while seated.
Multi-directional walking functionality realized through 12 powerful torque actuators and the latest control algorithms.
AI vision technology, along with a multi-visual display system that provides navigation and omnidirectional vision.
This provides users with a safer and more convenient mobility experience.
The strong yet elegant silhouette was achieved through a design process that pursued perfection in proportion, surfaces, and details not seen in existing wearable robots. In particular, the fabric cover that wraps around the entire thigh from the robot's hip joint is a stylish element that respects the wearer's self-esteem and individuality, like fashionable athletic wear. It also acts as a device for the wearer to psychologically feel safe in interacting with the robot and blending in with the general public. This presents a new aesthetic for wearable robots where function and form are harmonized.
<Figure 3. WSF1 Vision Concept's Operating Principle. It walks autonomously and is worn from the front while the user is seated.>
KAIST Professor Hyunjoon Park said of the award, "We are focusing on using technology, aesthetics, and human-centered innovation to present advanced technical solutions as easy, enjoyable, and cool experiences for users. Based on Angel Robotics Inc.'s vision of 'recreating human ability with technology,' the WSF1 VISION Concept aimed to break away from the traditional framework of wearable robots and deliver a design experience that adds dignity, independence, and new style to the user's life."
<Figure 4. WSF1 Vision Concept Detail Image>
A physical model of the WSF1 VISION Concept is scheduled to be unveiled in the Future Hall of the 2025 Gwangju Design Biennale from August 30 to November 2. The theme is 'Po-yong-ji-deok' (the virtue of inclusion), and it will showcase the role of design language in creating an inclusive future society.
<Figure 5. WSF1 Vision Concept: Image of a Person Wearing and Walking>
2025.08.09 View 49
KAIST’s Wearable Robot Design Wins ‘2025 Red Dot Award Best of the Best’
<Professor Hyunjoon Park, M.S candidate Eun-ju Kang, Prospective M.S candidate Jae-seong Kim, undergraduate student Min-su Kim>
A team led by Professor Hyunjoon Park from the Department of Industrial Design won the ‘Best of the Best’ award at the 2025 Red Dot Design Awards, one of the world's top three design awards, for their 'Angel Robotics WSF1 VISION Concept.'
The design for the next-generation wearable robot for people with paraplegia successfully implements functionality, aesthetics, and social inclusion. This latest achievement follows the team's iF Design Award win for the WalkON Suit F1 prototype, which also won a gold medal at the Cybathlon last year. This marks consecutive wins at top-tier international design awards.
KAIST (President Kwang-hyung Lee) announced on the 8th of August that Move Lab, a research team led by Professor Hyunjoon Park from the Department of Industrial Design, won the 'Best of the Best' award in the Design Concept-Professional category at the prestigious '2025 Red Dot Design Awards' for their next-generation wearable robot design, the ‘Angel Robotics WSF1 VISION Concept.’
The German 'Red Dot Design Awards' is one of the world's most well-known design competitions. It is considered one of the world's top three design awards along with Germany’s iF Design Awards and America’s IDEA. The ‘Best of the Best’ award is given to the best design in a category and is awarded only to a very select few of the top designs (within the top 1%) among all Red Dot Award winners.
Professor Hyunjoon Park’s team was honored with the ‘Best of the Best’ award for a user-friendly follow-up development of the ‘WalkON Suit F1 prototype,’ which won a gold medal at the 2024 Cybathlon and an iF Design Award in 2025.
<Figure 1. WSF1 Vision Concept Main Image>
This award-winning design is the result of industry-academic cooperation with Angel Robotics Inc., founded by Professor Kyoungchul Kong from the KAIST Department of Mechanical Engineering. It is a concept design that proposes a next-generation wearable robot (an ultra-personal mobility device) that can be used by people with paraplegia in their daily lives.
The research team focused on transforming Angel Robotics Inc.'s advanced engineering platform into an intuitive and emotional, user-centric experience, implementing a design solution that simultaneously possesses functionality, aesthetics, and social inclusion.
<Figure 2. WSF1 Vision Concept Full Exterior (Front View)>
The WSF1 VISION Concept includes innovative features implemented in Professor Kyoungchul Kong’s Exo Lab, such as:
An autonomous access function where the robot finds the user on its own.
A front-loading mechanism designed for the user to put it on alone while seated.
Multi-directional walking functionality realized through 12 powerful torque actuators and the latest control algorithms.
AI vision technology, along with a multi-visual display system that provides navigation and omnidirectional vision.
This provides users with a safer and more convenient mobility experience.
The strong yet elegant silhouette was achieved through a design process that pursued perfection in proportion, surfaces, and details not seen in existing wearable robots. In particular, the fabric cover that wraps around the entire thigh from the robot's hip joint is a stylish element that respects the wearer's self-esteem and individuality, like fashionable athletic wear. It also acts as a device for the wearer to psychologically feel safe in interacting with the robot and blending in with the general public. This presents a new aesthetic for wearable robots where function and form are harmonized.
<Figure 3. WSF1 Vision Concept's Operating Principle. It walks autonomously and is worn from the front while the user is seated.>
KAIST Professor Hyunjoon Park said of the award, "We are focusing on using technology, aesthetics, and human-centered innovation to present advanced technical solutions as easy, enjoyable, and cool experiences for users. Based on Angel Robotics Inc.'s vision of 'recreating human ability with technology,' the WSF1 VISION Concept aimed to break away from the traditional framework of wearable robots and deliver a design experience that adds dignity, independence, and new style to the user's life."
<Figure 4. WSF1 Vision Concept Detail Image>
A physical model of the WSF1 VISION Concept is scheduled to be unveiled in the Future Hall of the 2025 Gwangju Design Biennale from August 30 to November 2. The theme is 'Po-yong-ji-deok' (the virtue of inclusion), and it will showcase the role of design language in creating an inclusive future society.
<Figure 5. WSF1 Vision Concept: Image of a Person Wearing and Walking>
2025.08.09 View 49 -
 Unlocking New Potential for Natural Gas–Based Bioplastic Production
<(From Left)Jaewook Myung from KAIST, Sunho Park from KAIST, Dr. Chungheon Shin from Stanford University, Prof. Craig S. Criddle from Stanford University >
KAIST announced that a research team led by Professor Jaewook Myung from the Department of Civil and Environmental Engineering, in collaboration with Stanford University, has identified how ethane (C2H6)—a major constituent of natural gas—affects the core metabolic pathways of the obligate methanotroph Methylosinus trichosporium OB3b.
Methane (CH4), a greenhouse gas with roughly 25 times the global warming potential of carbon dioxide, is rarely emitted alone into the environment. It is typically released in mixtures with other gases. In the case of natural gas, ethane can comprise up to 15% of the total composition.
Methanotrophs are aerobic bacteria that can utilize methane as their sole source of carbon and energy. Obligate methanotrophs, in particular, strictly utilize only C1 compounds such as methane or methanol. Until now, little was known about how these organisms respond to C2 compounds like ethane, which they cannot use for growth.
<Figure 1. Conceptual overview of obligate methanotroph metabolism and PHB biosynthesis under mixed-substrate conditions of methane and ethane>
This study reveals that although ethane cannot serve as a growth substrate, its presence significantly affects key metabolic functions in M. trichosporium OB3b—including methane oxidation, cell proliferation, and the intracellular synthesis of polyhydroxybutyrate (PHB), a biodegradable polymer.
Under varying methane and oxygen conditions, the team observed that ethane addition consistently resulted in three metabolic effects: reduced cell growth, lower methane consumption, and increased PHB accumulation. These effects intensified with rising ethane concentrations. Notably, ethane oxidation occurred only when methane was present, confirming that it is co-oxidized via particulate methane monooxygenase (pMMO), the key enzyme responsible for methane oxidation.
<Figure2. Effects of increasing ethane concentrations on methane and ethane consumption, cell growth, and PHB production in Methylosinus trichosporium OB3b>
Further analysis showed that acetate, an intermediate formed during ethane oxidation, played a pivotal role in this response. Higher acetate levels inhibited growth but enhanced PHB production, suggesting that ethane-derived acetate drives contrasting carbon assimilation patterns depending on nutrient conditions—nutrient-balanced growth phase and nutrient-imbalanced PHB accumulation phas.
In addition, when external reducing power was supplemented (via methanol or formate), ethane consumption was enhanced significantly, while methane oxidation remained largely unaffected. This finding suggests that ethane, despite not supporting growth, actively competes for intracellular resources such as reducing equivalents. It offers new insights into substrate prioritization and resource allocation in methanotrophs under mixed-substrate conditions.
Interestingly, while methane uptake declined in the presence of ethane, the expression of pmoA, the gene encoding pMMO, remained unchanged. This suggests that ethane’s impact occurs beyond the transcriptional level—likely via post-transcriptional or enzymatic regulation.
<Figure 3. Mechanistic analysis of ethane-induced metabolic changes in obligate methanotrophs: acetate-driven carbon assimilation change (blue box), intracellular reducing power depletion (red box), and pmoA expression quantitative analysis (green box)>
“This is the first study to systematically investigate how obligate methanotrophs respond to complex gas mixtures involving ethane,” said Professor Jaewook Myung. “Our findings show that even non-growth substrates can meaningfully influence microbial metabolism and biopolymer synthesis, opening new possibilities for methane-based biotechnologies and bioplastic production.”
The study was supported by the National Research Foundation of Korea, the Ministry of Land, Infrastructure and Transport, and the Ministry of Oceans and Fisheries. The results were published in Applied and Environmental Microbiology, a journal of the American Society for Microbiology.
2025.08.07 View 153
Unlocking New Potential for Natural Gas–Based Bioplastic Production
<(From Left)Jaewook Myung from KAIST, Sunho Park from KAIST, Dr. Chungheon Shin from Stanford University, Prof. Craig S. Criddle from Stanford University >
KAIST announced that a research team led by Professor Jaewook Myung from the Department of Civil and Environmental Engineering, in collaboration with Stanford University, has identified how ethane (C2H6)—a major constituent of natural gas—affects the core metabolic pathways of the obligate methanotroph Methylosinus trichosporium OB3b.
Methane (CH4), a greenhouse gas with roughly 25 times the global warming potential of carbon dioxide, is rarely emitted alone into the environment. It is typically released in mixtures with other gases. In the case of natural gas, ethane can comprise up to 15% of the total composition.
Methanotrophs are aerobic bacteria that can utilize methane as their sole source of carbon and energy. Obligate methanotrophs, in particular, strictly utilize only C1 compounds such as methane or methanol. Until now, little was known about how these organisms respond to C2 compounds like ethane, which they cannot use for growth.
<Figure 1. Conceptual overview of obligate methanotroph metabolism and PHB biosynthesis under mixed-substrate conditions of methane and ethane>
This study reveals that although ethane cannot serve as a growth substrate, its presence significantly affects key metabolic functions in M. trichosporium OB3b—including methane oxidation, cell proliferation, and the intracellular synthesis of polyhydroxybutyrate (PHB), a biodegradable polymer.
Under varying methane and oxygen conditions, the team observed that ethane addition consistently resulted in three metabolic effects: reduced cell growth, lower methane consumption, and increased PHB accumulation. These effects intensified with rising ethane concentrations. Notably, ethane oxidation occurred only when methane was present, confirming that it is co-oxidized via particulate methane monooxygenase (pMMO), the key enzyme responsible for methane oxidation.
<Figure2. Effects of increasing ethane concentrations on methane and ethane consumption, cell growth, and PHB production in Methylosinus trichosporium OB3b>
Further analysis showed that acetate, an intermediate formed during ethane oxidation, played a pivotal role in this response. Higher acetate levels inhibited growth but enhanced PHB production, suggesting that ethane-derived acetate drives contrasting carbon assimilation patterns depending on nutrient conditions—nutrient-balanced growth phase and nutrient-imbalanced PHB accumulation phas.
In addition, when external reducing power was supplemented (via methanol or formate), ethane consumption was enhanced significantly, while methane oxidation remained largely unaffected. This finding suggests that ethane, despite not supporting growth, actively competes for intracellular resources such as reducing equivalents. It offers new insights into substrate prioritization and resource allocation in methanotrophs under mixed-substrate conditions.
Interestingly, while methane uptake declined in the presence of ethane, the expression of pmoA, the gene encoding pMMO, remained unchanged. This suggests that ethane’s impact occurs beyond the transcriptional level—likely via post-transcriptional or enzymatic regulation.
<Figure 3. Mechanistic analysis of ethane-induced metabolic changes in obligate methanotrophs: acetate-driven carbon assimilation change (blue box), intracellular reducing power depletion (red box), and pmoA expression quantitative analysis (green box)>
“This is the first study to systematically investigate how obligate methanotrophs respond to complex gas mixtures involving ethane,” said Professor Jaewook Myung. “Our findings show that even non-growth substrates can meaningfully influence microbial metabolism and biopolymer synthesis, opening new possibilities for methane-based biotechnologies and bioplastic production.”
The study was supported by the National Research Foundation of Korea, the Ministry of Land, Infrastructure and Transport, and the Ministry of Oceans and Fisheries. The results were published in Applied and Environmental Microbiology, a journal of the American Society for Microbiology.
2025.08.07 View 153 -
 KAIST Develops ‘Real-Time Programmable Robotic Sheet’ That Can Grasp and Walk on Its Own
<(From left) Prof. Inkyu Park from KAIST, Prof. Yongrok Jeong from Kyungpook National University, Dr. Hyunkyu Park from KAIST and Prof.Jung Kim from KAIST>
Folding structures are widely used in robot design as an intuitive and efficient shape-morphing mechanism, with applications explored in space and aerospace robots, soft robots, and foldable grippers (hands). However, existing folding mechanisms have fixed hinges and folding directions, requiring redesign and reconstruction every time the environment or task changes. A Korean research team has now developed a “field-programmable robotic folding sheet” that can be programmed in real time according to its surroundings, significantly enhancing robots’ shape-morphing capabilities and opening new possibilities in robotics.
KAIST (President Kwang Hyung Lee) announced on the 6th that Professors Jung Kim and Inkyu Park of the Department of Mechanical Engineering have developed the foundational technology for a “field-programmable robotic folding sheet” that enables real-time shape programming.
This technology is a successful application of the “field-programmability” concept to foldable structures. It proposes an integrated material technology and programming methodology that can instantly reflect user commands—such as “where to fold, in which direction, and by how much”—onto the material's shape in real time.
The robotic sheet consists of a thin and flexible polymer substrate embedded with a micro metal resistor network. These metal resistors simultaneously serve as heaters and temperature sensors, allowing the system to sense and control its folding state without any external devices.
Furthermore, using software that combines genetic algorithms and deep neural networks, the user can input desired folding locations, directions, and intensities. The sheet then autonomously repeats heating and cooling cycles to create the precise desired shape.
In particular, closed-loop control of the temperature distribution enhances real-time folding precision and compensates for environmental changes. It also improves the traditionally slow response time of heat-based folding technologies.
The ability to program shapes in real time enables a wide variety of robotic functions to be implemented on the fly, without the need for complex hardware redesign.
In fact, the research team demonstrated an adaptive robotic hand (gripper) that can change its grasping strategy to suit various object shapes using a single material. They also placed the same robotic sheet on the ground to allow it to walk or crawl, showcasing bioinspired locomotion strategies. This presents potential for expanding into environmentally adaptive autonomous robots that can alter their form in response to surroundings.
Professor Jung Kim stated, “This study brings us a step closer to realizing ‘morphological intelligence,’ a concept where shape itself embodies intelligence and enables smart motion. In the future, we plan to evolve this into a next-generation physical AI platform with applications in disaster-response robots, customized medical assistive devices, and space exploration tools—by improving materials and structures for greater load support and faster cooling, and expanding to electrode-free, fully integrated designs of various forms and sizes.”
This research, co-led by Dr. Hyunkyu Park (currently at Samsung Advanced Institute of Technology, Samsung Electronics) and Professor Yongrok Jeong (currently at Kyungpook National University), was published in the August 2025 online edition of the international journal Nature Communications.
※ Paper title: Field-programmable robotic folding sheet ※ DOI: 10.1038/s41467-025-61838-3
This research was supported by the National Research Foundation of Korea (Ministry of Science and ICT). (RS-2021-NR059641, 2021R1A2C3008742)
Video file: https://drive.google.com/file/d/18R0oW7SJVYH-gd1Er_S-9Myar8dm8Fzp/view?usp=sharing
2025.08.06 View 233
KAIST Develops ‘Real-Time Programmable Robotic Sheet’ That Can Grasp and Walk on Its Own
<(From left) Prof. Inkyu Park from KAIST, Prof. Yongrok Jeong from Kyungpook National University, Dr. Hyunkyu Park from KAIST and Prof.Jung Kim from KAIST>
Folding structures are widely used in robot design as an intuitive and efficient shape-morphing mechanism, with applications explored in space and aerospace robots, soft robots, and foldable grippers (hands). However, existing folding mechanisms have fixed hinges and folding directions, requiring redesign and reconstruction every time the environment or task changes. A Korean research team has now developed a “field-programmable robotic folding sheet” that can be programmed in real time according to its surroundings, significantly enhancing robots’ shape-morphing capabilities and opening new possibilities in robotics.
KAIST (President Kwang Hyung Lee) announced on the 6th that Professors Jung Kim and Inkyu Park of the Department of Mechanical Engineering have developed the foundational technology for a “field-programmable robotic folding sheet” that enables real-time shape programming.
This technology is a successful application of the “field-programmability” concept to foldable structures. It proposes an integrated material technology and programming methodology that can instantly reflect user commands—such as “where to fold, in which direction, and by how much”—onto the material's shape in real time.
The robotic sheet consists of a thin and flexible polymer substrate embedded with a micro metal resistor network. These metal resistors simultaneously serve as heaters and temperature sensors, allowing the system to sense and control its folding state without any external devices.
Furthermore, using software that combines genetic algorithms and deep neural networks, the user can input desired folding locations, directions, and intensities. The sheet then autonomously repeats heating and cooling cycles to create the precise desired shape.
In particular, closed-loop control of the temperature distribution enhances real-time folding precision and compensates for environmental changes. It also improves the traditionally slow response time of heat-based folding technologies.
The ability to program shapes in real time enables a wide variety of robotic functions to be implemented on the fly, without the need for complex hardware redesign.
In fact, the research team demonstrated an adaptive robotic hand (gripper) that can change its grasping strategy to suit various object shapes using a single material. They also placed the same robotic sheet on the ground to allow it to walk or crawl, showcasing bioinspired locomotion strategies. This presents potential for expanding into environmentally adaptive autonomous robots that can alter their form in response to surroundings.
Professor Jung Kim stated, “This study brings us a step closer to realizing ‘morphological intelligence,’ a concept where shape itself embodies intelligence and enables smart motion. In the future, we plan to evolve this into a next-generation physical AI platform with applications in disaster-response robots, customized medical assistive devices, and space exploration tools—by improving materials and structures for greater load support and faster cooling, and expanding to electrode-free, fully integrated designs of various forms and sizes.”
This research, co-led by Dr. Hyunkyu Park (currently at Samsung Advanced Institute of Technology, Samsung Electronics) and Professor Yongrok Jeong (currently at Kyungpook National University), was published in the August 2025 online edition of the international journal Nature Communications.
※ Paper title: Field-programmable robotic folding sheet ※ DOI: 10.1038/s41467-025-61838-3
This research was supported by the National Research Foundation of Korea (Ministry of Science and ICT). (RS-2021-NR059641, 2021R1A2C3008742)
Video file: https://drive.google.com/file/d/18R0oW7SJVYH-gd1Er_S-9Myar8dm8Fzp/view?usp=sharing
2025.08.06 View 233 -
 Key Figures in the Establishment of KAIST, Specially Invited to the Presidential Office’s National Appointment Ceremony
KAIST announced on August 6 that Professor Emeritus Jung-Woong Ra from the Department of Electrical Engineering and Won-ki Kwon, former Vice Minister of the Ministry of Science and Technology, who played pivotal roles in the establishment of KAIST, were selected as special guests for the 'National Appointment Ceremony' hosted by the Presidential Office on August 15th.
The Presidential Office selected special invitees across eight categories for the ceremony. These include individuals born in 1945 (referred to as 'Liberation Babies'), those involved in the founding of KAIST in 1971, independence activists and national patriots, overseas workers in Germany and the Middle East, AI industry professionals, residents from regions facing depopulation, leading figures in K-culture, military personnel, firefighters, police officers, families of fallen public servants and victims of social disasters, as well as promising talents in economics, science, culture, and the arts.
Considering the historical significance of its establishment and its symbolic meaning for the development of national science and technology, KAIST Professor Emeritus Jung-Woong Ra, who was a key figure in the establishment of the Department of Electrical Engineering after being appointed as a professor in 1971, and former Vice Minister Kwon Won-ki, who was the first practical leader of the establishment project. Both were officially included on the special invitation list.
Briefing from the Presidential Office regarding the 'National Appointment Ceremony' (2025.07.28) https://www.president.go.kr/newsroom/briefing/grehGMuP
2025.08.06 View 182
Key Figures in the Establishment of KAIST, Specially Invited to the Presidential Office’s National Appointment Ceremony
KAIST announced on August 6 that Professor Emeritus Jung-Woong Ra from the Department of Electrical Engineering and Won-ki Kwon, former Vice Minister of the Ministry of Science and Technology, who played pivotal roles in the establishment of KAIST, were selected as special guests for the 'National Appointment Ceremony' hosted by the Presidential Office on August 15th.
The Presidential Office selected special invitees across eight categories for the ceremony. These include individuals born in 1945 (referred to as 'Liberation Babies'), those involved in the founding of KAIST in 1971, independence activists and national patriots, overseas workers in Germany and the Middle East, AI industry professionals, residents from regions facing depopulation, leading figures in K-culture, military personnel, firefighters, police officers, families of fallen public servants and victims of social disasters, as well as promising talents in economics, science, culture, and the arts.
Considering the historical significance of its establishment and its symbolic meaning for the development of national science and technology, KAIST Professor Emeritus Jung-Woong Ra, who was a key figure in the establishment of the Department of Electrical Engineering after being appointed as a professor in 1971, and former Vice Minister Kwon Won-ki, who was the first practical leader of the establishment project. Both were officially included on the special invitation list.
Briefing from the Presidential Office regarding the 'National Appointment Ceremony' (2025.07.28) https://www.president.go.kr/newsroom/briefing/grehGMuP
2025.08.06 View 182 -
 Material Innovation Realized with Robotic Arms and AI, Without Human Researchers
<(From Left) M.S candidate Dongwoo Kim from KAIST, Ph.D candidate Hyun-Gi Lee from KAIST, Intern Yeham Kang from KAIST, M.S candidate Seongjae Bae from KAIST, Professor Dong-Hwa Seo from KAIST, (From top right, from left) Senior Researcher Inchul Park from POSCO Holdings, Senior Researcher Jung Woo Park, senior researcher from POSCO Holdings>
A joint research team from industry and academia in Korea has successfully developed an autonomous lab that uses AI and automation to create new cathode materials for secondary batteries. This system operates without human intervention, drastically reducing researcher labor and cutting the material discovery period by 93%.
* Autonomous Lab: A platform that autonomously designs, conducts, and analyzes experiments to find the optimal material.
KAIST (President Kwang Hyung Lee) announced on the 3rd of August that the research team led by Professor Dong-Hwa Seo of the Department of Materials Science and Engineering, in collaboration with the team of LIB Materials Research Center in Energy Materials R&D Laboratories at POSCO Holdings' POSCO N.EX.T Hub (Director Ki Soo Kim), built the lab to explore cathode materials using AI and automation technology.
Developing secondary battery cathode materials is a labor-intensive and time-consuming process for skilled researchers. It involves extensive exploration of various compositions and experimental variables through weighing, transporting, mixing, sintering*, and analyzing samples.
* Sintering: A process in which powder particles are heated to form a single solid mass through thermal activation.
The research team's autonomous lab combines an automated system with an AI model. The system handles all experimental steps—weighing, mixing, pelletizing, sintering, and analysis—without human interference. The AI model then interprets the data, learns from it, and selects the best candidates for the next experiment.
<Figure 1. Outline of the Anode Material Autonomous Exploration Laboratory>
To increase efficiency, the team designed the automation system with separate modules for each process, which are managed by a central robotic arm. This modular approach reduces the system's reliance on the robotic arm.
The team also significantly improved the synthesis speed by using a new high-speed sintering method, which is 50 times faster than the conventional low-speed method. This allows the autonomous lab to acquire 12 times more material data compared to traditional, researcher-led experiments.
<Figure 2. Synthesis of Cathode Material Using a High-Speed Sintering Device>
The vast amount of data collected is automatically interpreted by the AI model to extract information such as synthesized phases and impurity ratios. This data is systematically stored to create a high-quality database, which then serves as training data for an optimization AI model. This creates a closed-loop experimental system that recommends the next cathode composition and synthesis conditions for the automated system.
* Closed-loop experimental system: A system that independently performs all experimental processes without researcher intervention.
Operating this intelligent automation system 24 hours a day can secure more than 12 times the experimental data and shorten material discovery time by 93%. For a project requiring 500 experiments, the system can complete the work in about 6 days, whereas a traditional researcher-led approach would take 84 days.
During development, POSCO Holdings team managed the overall project planning, reviewed the platform design, and co-developed the partial module design and AI-based experimental model. The KAIST team, led by Professor Dong-hwa Seo, was responsible for the actual system implementation and operation, including platform design, module fabrication, algorithm creation, and system verification and improvement.
Professor Dong-Hwa Seo of KAIST stated that this system is a solution to the decrease in research personnel due to the low birth rate in Korea. He expects it will enhance global competitiveness by accelerating secondary battery material development through the acquisition of high-quality data.
<Figure 3. Exterior View (Side) of the Cathode Material Autonomous Exploration Laboratory>
POSCO N.EX.T Hub plans to apply an upgraded version of this autonomous lab to its own research facilities after 2026 to dramatically speed up next-generation secondary battery material development. They are planning further developments to enhance the system's stability and scalability, and hope this industry-academia collaboration will serve as a model for using innovative technology in real-world R&D.
<Figure 4. Exterior View (Front) of the Cathode Material Autonomous Exploration Laboratory>
The research was spearheaded by Ph.D. student Hyun-Gi Lee, along with master's students Seongjae Bae and Dongwoo Kim from Professor Dong-Hwa Seo’s lab at KAIST. Senior researchers Jung Woo Park and Inchul Park from LIB Materials Research Center of POSCO N.EX.T Hub's Energy Materials R&D Laboratories (Director Jeongjin Hong) also participated.
2025.08.06 View 125
Material Innovation Realized with Robotic Arms and AI, Without Human Researchers
<(From Left) M.S candidate Dongwoo Kim from KAIST, Ph.D candidate Hyun-Gi Lee from KAIST, Intern Yeham Kang from KAIST, M.S candidate Seongjae Bae from KAIST, Professor Dong-Hwa Seo from KAIST, (From top right, from left) Senior Researcher Inchul Park from POSCO Holdings, Senior Researcher Jung Woo Park, senior researcher from POSCO Holdings>
A joint research team from industry and academia in Korea has successfully developed an autonomous lab that uses AI and automation to create new cathode materials for secondary batteries. This system operates without human intervention, drastically reducing researcher labor and cutting the material discovery period by 93%.
* Autonomous Lab: A platform that autonomously designs, conducts, and analyzes experiments to find the optimal material.
KAIST (President Kwang Hyung Lee) announced on the 3rd of August that the research team led by Professor Dong-Hwa Seo of the Department of Materials Science and Engineering, in collaboration with the team of LIB Materials Research Center in Energy Materials R&D Laboratories at POSCO Holdings' POSCO N.EX.T Hub (Director Ki Soo Kim), built the lab to explore cathode materials using AI and automation technology.
Developing secondary battery cathode materials is a labor-intensive and time-consuming process for skilled researchers. It involves extensive exploration of various compositions and experimental variables through weighing, transporting, mixing, sintering*, and analyzing samples.
* Sintering: A process in which powder particles are heated to form a single solid mass through thermal activation.
The research team's autonomous lab combines an automated system with an AI model. The system handles all experimental steps—weighing, mixing, pelletizing, sintering, and analysis—without human interference. The AI model then interprets the data, learns from it, and selects the best candidates for the next experiment.
<Figure 1. Outline of the Anode Material Autonomous Exploration Laboratory>
To increase efficiency, the team designed the automation system with separate modules for each process, which are managed by a central robotic arm. This modular approach reduces the system's reliance on the robotic arm.
The team also significantly improved the synthesis speed by using a new high-speed sintering method, which is 50 times faster than the conventional low-speed method. This allows the autonomous lab to acquire 12 times more material data compared to traditional, researcher-led experiments.
<Figure 2. Synthesis of Cathode Material Using a High-Speed Sintering Device>
The vast amount of data collected is automatically interpreted by the AI model to extract information such as synthesized phases and impurity ratios. This data is systematically stored to create a high-quality database, which then serves as training data for an optimization AI model. This creates a closed-loop experimental system that recommends the next cathode composition and synthesis conditions for the automated system.
* Closed-loop experimental system: A system that independently performs all experimental processes without researcher intervention.
Operating this intelligent automation system 24 hours a day can secure more than 12 times the experimental data and shorten material discovery time by 93%. For a project requiring 500 experiments, the system can complete the work in about 6 days, whereas a traditional researcher-led approach would take 84 days.
During development, POSCO Holdings team managed the overall project planning, reviewed the platform design, and co-developed the partial module design and AI-based experimental model. The KAIST team, led by Professor Dong-hwa Seo, was responsible for the actual system implementation and operation, including platform design, module fabrication, algorithm creation, and system verification and improvement.
Professor Dong-Hwa Seo of KAIST stated that this system is a solution to the decrease in research personnel due to the low birth rate in Korea. He expects it will enhance global competitiveness by accelerating secondary battery material development through the acquisition of high-quality data.
<Figure 3. Exterior View (Side) of the Cathode Material Autonomous Exploration Laboratory>
POSCO N.EX.T Hub plans to apply an upgraded version of this autonomous lab to its own research facilities after 2026 to dramatically speed up next-generation secondary battery material development. They are planning further developments to enhance the system's stability and scalability, and hope this industry-academia collaboration will serve as a model for using innovative technology in real-world R&D.
<Figure 4. Exterior View (Front) of the Cathode Material Autonomous Exploration Laboratory>
The research was spearheaded by Ph.D. student Hyun-Gi Lee, along with master's students Seongjae Bae and Dongwoo Kim from Professor Dong-Hwa Seo’s lab at KAIST. Senior researchers Jung Woo Park and Inchul Park from LIB Materials Research Center of POSCO N.EX.T Hub's Energy Materials R&D Laboratories (Director Jeongjin Hong) also participated.
2025.08.06 View 125 -
 KAIST Develops AI ‘MARIOH’ to Uncover and Reconstruct Hidden Multi-Entity Relationships
<(From Left) Professor Kijung Shin, Ph.D candidate Kyuhan Lee, and Ph.D candidate Geon Lee>
Just like when multiple people gather simultaneously in a meeting room, higher-order interactions—where many entities interact at once—occur across various fields and reflect the complexity of real-world relationships. However, due to technical limitations, in many fields, only low-order pairwise interactions between entities can be observed and collected, which results in the loss of full context and restricts practical use. KAIST researchers have developed the AI model “MARIOH,” which can accurately reconstruct* higher-order interactions from such low-order information, opening up innovative analytical possibilities in fields like social network analysis, neuroscience, and life sciences.
*Reconstruction: Estimating/reconstructing the original structure that has disappeared or was not observed.
KAIST (President Kwang Hyung Lee) announced on the 5th that Professor Kijung Shin’s research team at the Kim Jaechul Graduate School of AI has developed an AI technology called “MARIOH” (Multiplicity-Aware Hypergraph Reconstruction), which can reconstruct higher-order interaction structures with high accuracy using only low-order interaction data.
Reconstructing higher-order interactions is challenging because a vast number of higher-order interactions can arise from the same low-order structure.
The key idea behind MARIOH, developed by the research team, is to utilize multiplicity information of low-order interactions to drastically reduce the number of candidate higher-order interactions that could stem from a given structure.
In addition, by employing efficient search techniques, MARIOH quickly identifies promising interaction candidates and uses multiplicity-based deep learning to accurately predict the likelihood that each candidate represents an actual higher-order interaction.
<Figure 1. An example of recovering high-dimensional relationships (right) from low-dimensional paper co-authorship relationships (left) with 100% accuracy, using MARIOH technology.>
Through experiments on ten diverse real-world datasets, the research team showed that MARIOH reconstructed higher-order interactions with up to 74% greater accuracy compared to existing methods.
For instance, in a dataset on co-authorship relations (source: DBLP), MARIOH achieved a reconstruction accuracy of over 98%, significantly outperforming existing methods, which reached only about 86%. Furthermore, leveraging the reconstructed higher-order structures led to improved performance in downstream tasks, including prediction and classification.
According to Kijung, “MARIOH moves beyond existing approaches that rely solely on simplified connection information, enabling precise analysis of the complex interconnections found in the real world.” Furthermore, “it has broad potential applications in fields such as social network analysis for group chats or collaborative networks, life sciences for studying protein complexes or gene interactions, and neuroscience for tracking simultaneous activity across multiple brain regions.”
The research was conducted by Kyuhan Lee (Integrated M.S.–Ph.D. program at the Kim Jaechul Graduate School of AI at KAIST; currently a software engineer at GraphAI), Geon Lee (Integrated M.S.–Ph.D. program at KAIST), and Professor Kijung Shin. It was presented at the 41st IEEE International Conference on Data Engineering (IEEE ICDE), held in Hong Kong this past May.
※ Paper title: MARIOH: Multiplicity-Aware Hypergraph Reconstruction ※ DOI: https://doi.ieeecomputersociety.org/10.1109/ICDE65448.2025.00233
<Figure 2. An example of the process of recovering high-dimensional relationships using MARIOH technology>
This research was supported by the Institute of Information & Communications Technology Planning & Evaluation (IITP) through the project “EntireDB2AI: Foundational technologies and software for deep representation learning and prediction using complete relational databases,” as well as by the National Research Foundation of Korea through the project “Graph Foundation Model: Graph-based machine learning applicable across various modalities and domains.”
2025.08.05 View 253
KAIST Develops AI ‘MARIOH’ to Uncover and Reconstruct Hidden Multi-Entity Relationships
<(From Left) Professor Kijung Shin, Ph.D candidate Kyuhan Lee, and Ph.D candidate Geon Lee>
Just like when multiple people gather simultaneously in a meeting room, higher-order interactions—where many entities interact at once—occur across various fields and reflect the complexity of real-world relationships. However, due to technical limitations, in many fields, only low-order pairwise interactions between entities can be observed and collected, which results in the loss of full context and restricts practical use. KAIST researchers have developed the AI model “MARIOH,” which can accurately reconstruct* higher-order interactions from such low-order information, opening up innovative analytical possibilities in fields like social network analysis, neuroscience, and life sciences.
*Reconstruction: Estimating/reconstructing the original structure that has disappeared or was not observed.
KAIST (President Kwang Hyung Lee) announced on the 5th that Professor Kijung Shin’s research team at the Kim Jaechul Graduate School of AI has developed an AI technology called “MARIOH” (Multiplicity-Aware Hypergraph Reconstruction), which can reconstruct higher-order interaction structures with high accuracy using only low-order interaction data.
Reconstructing higher-order interactions is challenging because a vast number of higher-order interactions can arise from the same low-order structure.
The key idea behind MARIOH, developed by the research team, is to utilize multiplicity information of low-order interactions to drastically reduce the number of candidate higher-order interactions that could stem from a given structure.
In addition, by employing efficient search techniques, MARIOH quickly identifies promising interaction candidates and uses multiplicity-based deep learning to accurately predict the likelihood that each candidate represents an actual higher-order interaction.
<Figure 1. An example of recovering high-dimensional relationships (right) from low-dimensional paper co-authorship relationships (left) with 100% accuracy, using MARIOH technology.>
Through experiments on ten diverse real-world datasets, the research team showed that MARIOH reconstructed higher-order interactions with up to 74% greater accuracy compared to existing methods.
For instance, in a dataset on co-authorship relations (source: DBLP), MARIOH achieved a reconstruction accuracy of over 98%, significantly outperforming existing methods, which reached only about 86%. Furthermore, leveraging the reconstructed higher-order structures led to improved performance in downstream tasks, including prediction and classification.
According to Kijung, “MARIOH moves beyond existing approaches that rely solely on simplified connection information, enabling precise analysis of the complex interconnections found in the real world.” Furthermore, “it has broad potential applications in fields such as social network analysis for group chats or collaborative networks, life sciences for studying protein complexes or gene interactions, and neuroscience for tracking simultaneous activity across multiple brain regions.”
The research was conducted by Kyuhan Lee (Integrated M.S.–Ph.D. program at the Kim Jaechul Graduate School of AI at KAIST; currently a software engineer at GraphAI), Geon Lee (Integrated M.S.–Ph.D. program at KAIST), and Professor Kijung Shin. It was presented at the 41st IEEE International Conference on Data Engineering (IEEE ICDE), held in Hong Kong this past May.
※ Paper title: MARIOH: Multiplicity-Aware Hypergraph Reconstruction ※ DOI: https://doi.ieeecomputersociety.org/10.1109/ICDE65448.2025.00233
<Figure 2. An example of the process of recovering high-dimensional relationships using MARIOH technology>
This research was supported by the Institute of Information & Communications Technology Planning & Evaluation (IITP) through the project “EntireDB2AI: Foundational technologies and software for deep representation learning and prediction using complete relational databases,” as well as by the National Research Foundation of Korea through the project “Graph Foundation Model: Graph-based machine learning applicable across various modalities and domains.”
2025.08.05 View 253 -
 Anti-Neuroinflammatory Natural Products from Isopod-Related Fungus Now Accessible via Chemical Synthesis
<(From left) Professor Sunkyu Han, Ph.D candidate Yoojin Lee, Ph.D candidate Taewan Kim>
"Herpotrichone" is a natural substance that has been evaluated highly for its excellent ability to suppress inflammation in the brain and protect nerve cells, displaying significant potential to be developed as a therapeutic agent for neurodegenerative brain diseases such as Alzheimer's disease and Parkinson's disease. This substance could only be obtained in minute quantities from fungi that are symbiotic with isopods. However, KAIST researchers have succeeded in chemically synthesizing this rare natural product, thereby presenting the possibility for the development of next-generation drugs for neurodegenerative diseases.
*Chemical Synthesis: A process of creating desired substances using chemical reactions.
KAIST (President Kwang Hyung Lee) announced on the 31st of July that a research team led by Professor Sunkyu Han of the Department of Chemistry successfully synthesized the natural anti-neuroinflammatory substances 'herpotrichones A, B, and C' for the first time.
Herpotrichone natural products are substances obtainable only in minute quantities from 'Herpotrichia sp. SF09', a symbiotic pill bug fungus, and possess a unique 6/6/6/6/3 pentacyclic framework consisting of five fused rings (four six-membered and one three-membered ring).
Interestingly, this substance exhibits excellent anti-neuroinflammatory effects that suppress brain inflammatory reactions. Recently, its mechanism of action to protect nerve cells by inhibiting ferroptosis (iron-mediated cell death) was also reported, raising expectations for its potential as a therapeutic drug for brain diseases.
Professor Han's research team devised a biosynthetically inspired strategy to chemically synthesize herpotrichoneS. The key to success was a named chemical reaction "Diels-Alder (DA) reaction". This reaction forms a six-membered ring by creating new bonds between carbon-based partners, much like two puzzle pieces interlocking to form a single ring.
<Figure 2. Key Synthetic Strategy for Hypotricon A, B, and C Based on Hydrogen Bonding>
Furthermore, the research team focused on a weak attractive phenomenon between molecules called "hydrogen bonding". By delicately designing and controlling this hydrogen bond, they were able to precisely induce the reaction to occur chemo-, regio- and stereoselectively, thereby synthesizing herpotrichone. Notably, without the pivotal hydrogen bond, only a small amount of the target natural product was formed or only undesirable byproducts were generated.
The configuration of the C2’ hydroxyl moiety was essential in directing the desired transition states leading to the target natural products.
Thanks to this induced hydrogen bonding, the reacting molecules approached the correct positions and went through an ideal transition state, allowing for the synthesis of herpotrichone C. This reaction principle was also successfully applied to herpotrichone A and B, enabling the successful synthesis of these natural products.
During the key Diels-Alder reaction conducted in the laboratory, new molecular structures not yet discovered in nature were also formed. Some of these have a high probability of being novel natural products with excellent pharmacological activity, thus doubling the significance of this research for anticipating natural products through synthesis.
Indeed, while Professor Han's research team conducted synthetic studies on herpotrichone A and B based on a 2019 paper by Chinese researchers who discovered and elucidated their structures, the research team observed the formation of undesired byproducts.
Interestingly, in 2024, the same Chinese research team that discovered herpotrichones A and bn reported the discovery of a new natural product called herpotrichone C, which turned out to be the same substance as the major byproduct previously obtained by Professor Han's team en route to herpotrichones A and B.
Professor Han stated, "This is the first total synthesis of a rare natural product with pharmacological activity related to neurodegenerative diseases and systematically presents the principle of biomimetic synthesis of complex natural products." He added, "It is expected to contribute to the development of novel natural product-based anti-neuroinflammatory therapeutics and biosynthesis research of this group of natural products."
This research outcome, with Yoojin Lee, a master's and Ph.D. integrated course student in the Department of Chemistry, as the first author, was published on July 16th in the Journal of the American Chemical Society (JACS), one of the most prestigious academic journals in the field of chemistry.
This research was supported by the National Research Foundation of Korea (NRF) Mid-career Researcher Support Program, the KAIST UP Project, the KAIST Grand Challenge 30 Project, and the KAIST Trans-Generational Collaborative Research Laboratory Project.
2025.08.04 View 294
Anti-Neuroinflammatory Natural Products from Isopod-Related Fungus Now Accessible via Chemical Synthesis
<(From left) Professor Sunkyu Han, Ph.D candidate Yoojin Lee, Ph.D candidate Taewan Kim>
"Herpotrichone" is a natural substance that has been evaluated highly for its excellent ability to suppress inflammation in the brain and protect nerve cells, displaying significant potential to be developed as a therapeutic agent for neurodegenerative brain diseases such as Alzheimer's disease and Parkinson's disease. This substance could only be obtained in minute quantities from fungi that are symbiotic with isopods. However, KAIST researchers have succeeded in chemically synthesizing this rare natural product, thereby presenting the possibility for the development of next-generation drugs for neurodegenerative diseases.
*Chemical Synthesis: A process of creating desired substances using chemical reactions.
KAIST (President Kwang Hyung Lee) announced on the 31st of July that a research team led by Professor Sunkyu Han of the Department of Chemistry successfully synthesized the natural anti-neuroinflammatory substances 'herpotrichones A, B, and C' for the first time.
Herpotrichone natural products are substances obtainable only in minute quantities from 'Herpotrichia sp. SF09', a symbiotic pill bug fungus, and possess a unique 6/6/6/6/3 pentacyclic framework consisting of five fused rings (four six-membered and one three-membered ring).
Interestingly, this substance exhibits excellent anti-neuroinflammatory effects that suppress brain inflammatory reactions. Recently, its mechanism of action to protect nerve cells by inhibiting ferroptosis (iron-mediated cell death) was also reported, raising expectations for its potential as a therapeutic drug for brain diseases.
Professor Han's research team devised a biosynthetically inspired strategy to chemically synthesize herpotrichoneS. The key to success was a named chemical reaction "Diels-Alder (DA) reaction". This reaction forms a six-membered ring by creating new bonds between carbon-based partners, much like two puzzle pieces interlocking to form a single ring.
<Figure 2. Key Synthetic Strategy for Hypotricon A, B, and C Based on Hydrogen Bonding>
Furthermore, the research team focused on a weak attractive phenomenon between molecules called "hydrogen bonding". By delicately designing and controlling this hydrogen bond, they were able to precisely induce the reaction to occur chemo-, regio- and stereoselectively, thereby synthesizing herpotrichone. Notably, without the pivotal hydrogen bond, only a small amount of the target natural product was formed or only undesirable byproducts were generated.
The configuration of the C2’ hydroxyl moiety was essential in directing the desired transition states leading to the target natural products.
Thanks to this induced hydrogen bonding, the reacting molecules approached the correct positions and went through an ideal transition state, allowing for the synthesis of herpotrichone C. This reaction principle was also successfully applied to herpotrichone A and B, enabling the successful synthesis of these natural products.
During the key Diels-Alder reaction conducted in the laboratory, new molecular structures not yet discovered in nature were also formed. Some of these have a high probability of being novel natural products with excellent pharmacological activity, thus doubling the significance of this research for anticipating natural products through synthesis.
Indeed, while Professor Han's research team conducted synthetic studies on herpotrichone A and B based on a 2019 paper by Chinese researchers who discovered and elucidated their structures, the research team observed the formation of undesired byproducts.
Interestingly, in 2024, the same Chinese research team that discovered herpotrichones A and bn reported the discovery of a new natural product called herpotrichone C, which turned out to be the same substance as the major byproduct previously obtained by Professor Han's team en route to herpotrichones A and B.
Professor Han stated, "This is the first total synthesis of a rare natural product with pharmacological activity related to neurodegenerative diseases and systematically presents the principle of biomimetic synthesis of complex natural products." He added, "It is expected to contribute to the development of novel natural product-based anti-neuroinflammatory therapeutics and biosynthesis research of this group of natural products."
This research outcome, with Yoojin Lee, a master's and Ph.D. integrated course student in the Department of Chemistry, as the first author, was published on July 16th in the Journal of the American Chemical Society (JACS), one of the most prestigious academic journals in the field of chemistry.
This research was supported by the National Research Foundation of Korea (NRF) Mid-career Researcher Support Program, the KAIST UP Project, the KAIST Grand Challenge 30 Project, and the KAIST Trans-Generational Collaborative Research Laboratory Project.
2025.08.04 View 294 -
 KAIST Reveals Placental Inflammation as the Cause of Allergies such as Pediatric Asthma
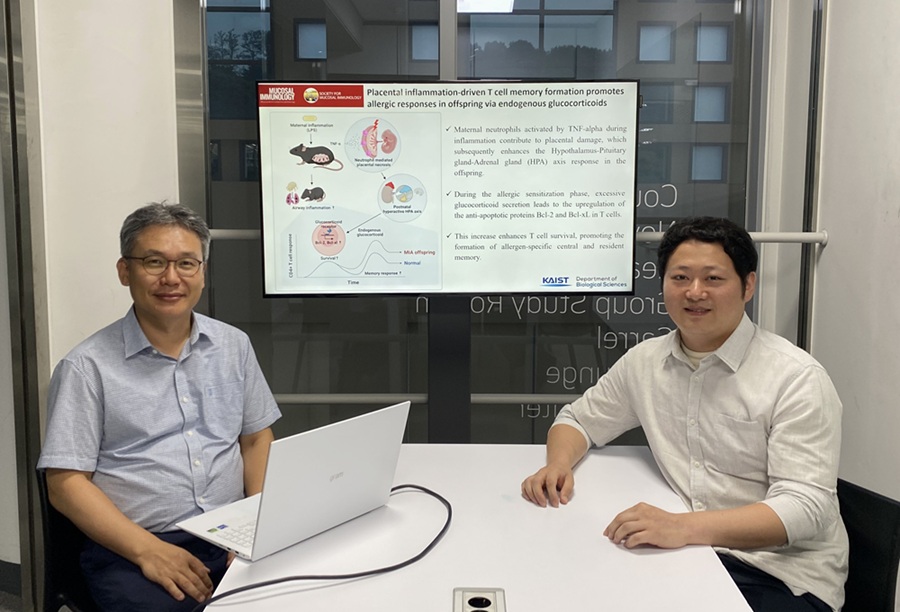
<(From left)Professor Heung-kyu Lee from the Department of Biological Sciences, Dr.Myeong Seung Kwon from the Graduate School of Medical Science>
It is already well-known that when a mother experiences inflammation during pregnancy, her child is more likely to develop allergic diseases. Recently, a KAIST research team became the first in the world to discover that inflammation within the placenta affects the fetus's immune system, leading to the child exhibiting excessive allergic reactions after birth. This study presents a new possibility for the early prediction and prevention of allergic diseases such as pediatric asthma.
KAIST (President Kwang Hyung Lee) announced on the 4th of August that a research team led by Professor Heung-kyu Lee from the Department of Biological Sciences found that inflammation occurring during pregnancy affects the fetus's stress response regulation system through the placenta. As a result, the survival and memory differentiation of T cells (key cells in the adaptive immune system) increase, which can lead to stronger allergic reactions in the child after birth.
The research team proved this through experiments on mice that had excessive inflammation induced during pregnancy. First, they injected the toxin component 'LPS (lipopolysaccharide),' a substance known to be a representative material that induces an inflammatory response in the immune system, into the mice to cause an inflammatory response in their bodies, which also caused inflammation in the placenta.
It was confirmed that the placental tissue, due to the inflammatory response, increased a signaling substance called 'Tumor Necrosis Factor-alpha (TNF-α),' and this substance activated immune cells called 'neutrophils*', causing inflammatory damage to the placenta. *Neutrophils: The most abundant type of white blood cells in our bodies (40-75%), playing an important role in innate immunity and killing invading bacteria and fungi.
This damage modulated postnatal offspring stress response, leading to a large secretion of stress hormone (glucocorticoid). As a result, the offspring's T cells, which are responsible for immune memory, survived longer and had stronger memory functions.
In particular, the memory T cells created through this process caused excessive allergic reactions when repeatedly exposed to antigens after birth. Specifically, when house dust mite 'allergens' were exposed to the airways of mice, a strong eosinophilic inflammatory response and excessive immune activation were observed, with an increase in immune cells important for allergy and asthma reactions.
Professor Heung Kyu Lee stated, "This study is the first in the world to identify how a mother's inflammatory response during pregnancy affects the fetus's allergic immune system through the placenta." He added, "This will be an important scientific basis for developing biomarkers for early prediction and establishing prevention strategies for pediatric allergic diseases."
The first author of this study is Dr. Myeong Seung Kwon from the KAIST Graduate School of Medical Science (currently a clinical fellow of gynecological oncology at Konyang University Hospital's Department of Obstetrics and Gynecology), and the research results were published in the authoritative journal in the field of mucosal immunology, 'Mucosal Immunology,' on July 1st. ※ Paper Title: Placental inflammation-driven T cell memory formation promotes allergic responses in offspring via endogenous glucocorticoids ※ DOI: https://doi.org/10.1016/j.mucimm.2025.06.006
This research was conducted as part of the Basic Science Research Program and the Bio-Medical Technology Development Program supported by the Ministry of Science and ICT and the National Research Foundation of Korea.
2025.08.03 View 180
KAIST Reveals Placental Inflammation as the Cause of Allergies such as Pediatric Asthma
<(From left)Professor Heung-kyu Lee from the Department of Biological Sciences, Dr.Myeong Seung Kwon from the Graduate School of Medical Science>
It is already well-known that when a mother experiences inflammation during pregnancy, her child is more likely to develop allergic diseases. Recently, a KAIST research team became the first in the world to discover that inflammation within the placenta affects the fetus's immune system, leading to the child exhibiting excessive allergic reactions after birth. This study presents a new possibility for the early prediction and prevention of allergic diseases such as pediatric asthma.
KAIST (President Kwang Hyung Lee) announced on the 4th of August that a research team led by Professor Heung-kyu Lee from the Department of Biological Sciences found that inflammation occurring during pregnancy affects the fetus's stress response regulation system through the placenta. As a result, the survival and memory differentiation of T cells (key cells in the adaptive immune system) increase, which can lead to stronger allergic reactions in the child after birth.
The research team proved this through experiments on mice that had excessive inflammation induced during pregnancy. First, they injected the toxin component 'LPS (lipopolysaccharide),' a substance known to be a representative material that induces an inflammatory response in the immune system, into the mice to cause an inflammatory response in their bodies, which also caused inflammation in the placenta.
It was confirmed that the placental tissue, due to the inflammatory response, increased a signaling substance called 'Tumor Necrosis Factor-alpha (TNF-α),' and this substance activated immune cells called 'neutrophils*', causing inflammatory damage to the placenta. *Neutrophils: The most abundant type of white blood cells in our bodies (40-75%), playing an important role in innate immunity and killing invading bacteria and fungi.
This damage modulated postnatal offspring stress response, leading to a large secretion of stress hormone (glucocorticoid). As a result, the offspring's T cells, which are responsible for immune memory, survived longer and had stronger memory functions.
In particular, the memory T cells created through this process caused excessive allergic reactions when repeatedly exposed to antigens after birth. Specifically, when house dust mite 'allergens' were exposed to the airways of mice, a strong eosinophilic inflammatory response and excessive immune activation were observed, with an increase in immune cells important for allergy and asthma reactions.
Professor Heung Kyu Lee stated, "This study is the first in the world to identify how a mother's inflammatory response during pregnancy affects the fetus's allergic immune system through the placenta." He added, "This will be an important scientific basis for developing biomarkers for early prediction and establishing prevention strategies for pediatric allergic diseases."
The first author of this study is Dr. Myeong Seung Kwon from the KAIST Graduate School of Medical Science (currently a clinical fellow of gynecological oncology at Konyang University Hospital's Department of Obstetrics and Gynecology), and the research results were published in the authoritative journal in the field of mucosal immunology, 'Mucosal Immunology,' on July 1st. ※ Paper Title: Placental inflammation-driven T cell memory formation promotes allergic responses in offspring via endogenous glucocorticoids ※ DOI: https://doi.org/10.1016/j.mucimm.2025.06.006
This research was conducted as part of the Basic Science Research Program and the Bio-Medical Technology Development Program supported by the Ministry of Science and ICT and the National Research Foundation of Korea.
2025.08.03 View 180 -
 KAIST Successfully Presents the Future of AI Transformation and Physical AI Strategy at the 1st National Strategic Technology Forum
<(Front row, fourth from the right) President Kwang Hyung Lee of KAIST, (back row, fifth from the right) Forum co-host Representative Hyung-Doo Choi, (back row, sixth from the left) Forum co-host Representative Han-Kyu Kim, along with ruling and opposition party members of the Science, ICT, Broadcasting, and Communications Committee and the Trade, Industry, Energy, SMEs, and Startups Committee, as well as Professors Hoe-Jun Yoo and Jung Kim from KAIST)>
KAIST (President Kwang Hyung Lee) announced on July that it had successfully held the “1st National Strategic Technology Forum” at the National Assembly Members' Office Building that day under the theme “The Future of Artificial Intelligence Transformation (AX): Physical AI.” This bipartisan policy forum aimed to discuss strategies for technology hegemony by leveraging Korea’s strengths in AI semiconductors and manufacturing.
The forum was hosted by KAIST and co-organized by Representative Hyung-Du Choi (People Power Party), the secretary of the National Assembly's Science, ICT, Broadcasting, and Communications Committee, and Representative Han-Kyu Kim (Democratic Party), a member of the Trade, Industry, Energy, SMEs, and Startups Committee. It marks the beginning of a five-part forum series, scheduled monthly through the rest of the year except for October.
The overarching theme, “Artificial Intelligence Transformation (AX),” was designed to address the structural changes reshaping industry, the economy, and society due to the spread of generative AI.
< KAIST President Kwang Hyung Lee delivering his remarks >
The first session focused on “Physical AI,” reflecting how AI innovation—sparked by the proliferation of large language models (LLMs)—is rapidly expanding into the physical realm through ultra-low-power, ultra-lightweight semiconductors. This includes applications in robotics, sensors, and edge devices. Physical AI refers to technologies that interact directly with the real world through AI integration with robotics, autonomous driving, and smart factories. It is drawing attention as a promising next-generation field where Korea can secure a strategic edge, given its strengths in semiconductors and manufacturing.
<Hoi-Jun Yoo, Dean of the KAIST Graduate School of AI Semiconductor>
Hoi-Jun Yoo, Dean of the KAIST Graduate School of AI Semiconductor, gave a presentation titled “The Second AI Innovation Enabled by Ultra-Low-Power AI Semiconductors and Lightweight AI Models,” covering semiconductor trends for implementing Physical AI, academic and industrial strategies for robotics and semiconductors, and Korea’s development direction for “K-Physical AI.”
<Professor Jung Kim, the head of KAIST’s Department of Mechanical and Aerospace Engineering>
Following that, Professor Jung Kim, the head of KAIST’s Department of Mechanical and Aerospace Engineering gave a talk on “Trends in Physical AI and Humanoid Robots,” predicting a new industrial paradigm shaped by AI-robot convergence. He presented global trends, Korea’s development trajectory, and survival strategies for humanoid robots that can supplement or replace human intellectual and physical functions.
During the open discussion that followed, participating lawmakers and experts engaged in in-depth conversations about the need for bipartisan strategies and collaboration.
Representative Hyung-Du Choi (People Power Party) stated, “Through this forum as a platform for public discourse, I will work to ensure that legislation and policy align with the direction of the science and technology field, and that necessary measures are taken promptly to strengthen national competitiveness.”
Representative Han-Kyu Kim (Democratic Party) emphasized, “As strategic planning in science and technology accelerates, it becomes more difficult to coordinate policies involving multiple ministries. Forums like this, which enable ongoing communication among stakeholders, are instrumental in finding effective solutions.”
KAIST President Kwang Hyung Lee remarked, “Although Korea is a latecomer in the generative AI field, we have a unique opportunity to gain strategic superiority in Physical AI, thanks to our technological capabilities in manufacturing, semiconductors, and robotics.” He added, “I hope lawmakers from both the ruling and opposition parties, along with experts, will come together regularly to devise practical policies and contribute to the advancement of Korea’s science and technology.”
<Poster of National Strategic Technology Forum>
This forum series aims to explore policy and institutional solutions to help Korea gain technological leadership in a global context where strategic technologies—such as AI, semiconductors, biotechnology, and energy—directly influence national security and economic sovereignty. Lawmakers from both the Science, ICT, Broadcasting, and Communications Committee and the Trade, Industry, Energy, SMEs, and Startups Committee will continue to participate, fostering bipartisan dialogue. The forums are coordinated by the KAIST Policy Research Institute for National Strategic Technologies.
2025.07.31 View 217
KAIST Successfully Presents the Future of AI Transformation and Physical AI Strategy at the 1st National Strategic Technology Forum
<(Front row, fourth from the right) President Kwang Hyung Lee of KAIST, (back row, fifth from the right) Forum co-host Representative Hyung-Doo Choi, (back row, sixth from the left) Forum co-host Representative Han-Kyu Kim, along with ruling and opposition party members of the Science, ICT, Broadcasting, and Communications Committee and the Trade, Industry, Energy, SMEs, and Startups Committee, as well as Professors Hoe-Jun Yoo and Jung Kim from KAIST)>
KAIST (President Kwang Hyung Lee) announced on July that it had successfully held the “1st National Strategic Technology Forum” at the National Assembly Members' Office Building that day under the theme “The Future of Artificial Intelligence Transformation (AX): Physical AI.” This bipartisan policy forum aimed to discuss strategies for technology hegemony by leveraging Korea’s strengths in AI semiconductors and manufacturing.
The forum was hosted by KAIST and co-organized by Representative Hyung-Du Choi (People Power Party), the secretary of the National Assembly's Science, ICT, Broadcasting, and Communications Committee, and Representative Han-Kyu Kim (Democratic Party), a member of the Trade, Industry, Energy, SMEs, and Startups Committee. It marks the beginning of a five-part forum series, scheduled monthly through the rest of the year except for October.
The overarching theme, “Artificial Intelligence Transformation (AX),” was designed to address the structural changes reshaping industry, the economy, and society due to the spread of generative AI.
< KAIST President Kwang Hyung Lee delivering his remarks >
The first session focused on “Physical AI,” reflecting how AI innovation—sparked by the proliferation of large language models (LLMs)—is rapidly expanding into the physical realm through ultra-low-power, ultra-lightweight semiconductors. This includes applications in robotics, sensors, and edge devices. Physical AI refers to technologies that interact directly with the real world through AI integration with robotics, autonomous driving, and smart factories. It is drawing attention as a promising next-generation field where Korea can secure a strategic edge, given its strengths in semiconductors and manufacturing.
<Hoi-Jun Yoo, Dean of the KAIST Graduate School of AI Semiconductor>
Hoi-Jun Yoo, Dean of the KAIST Graduate School of AI Semiconductor, gave a presentation titled “The Second AI Innovation Enabled by Ultra-Low-Power AI Semiconductors and Lightweight AI Models,” covering semiconductor trends for implementing Physical AI, academic and industrial strategies for robotics and semiconductors, and Korea’s development direction for “K-Physical AI.”
<Professor Jung Kim, the head of KAIST’s Department of Mechanical and Aerospace Engineering>
Following that, Professor Jung Kim, the head of KAIST’s Department of Mechanical and Aerospace Engineering gave a talk on “Trends in Physical AI and Humanoid Robots,” predicting a new industrial paradigm shaped by AI-robot convergence. He presented global trends, Korea’s development trajectory, and survival strategies for humanoid robots that can supplement or replace human intellectual and physical functions.
During the open discussion that followed, participating lawmakers and experts engaged in in-depth conversations about the need for bipartisan strategies and collaboration.
Representative Hyung-Du Choi (People Power Party) stated, “Through this forum as a platform for public discourse, I will work to ensure that legislation and policy align with the direction of the science and technology field, and that necessary measures are taken promptly to strengthen national competitiveness.”
Representative Han-Kyu Kim (Democratic Party) emphasized, “As strategic planning in science and technology accelerates, it becomes more difficult to coordinate policies involving multiple ministries. Forums like this, which enable ongoing communication among stakeholders, are instrumental in finding effective solutions.”
KAIST President Kwang Hyung Lee remarked, “Although Korea is a latecomer in the generative AI field, we have a unique opportunity to gain strategic superiority in Physical AI, thanks to our technological capabilities in manufacturing, semiconductors, and robotics.” He added, “I hope lawmakers from both the ruling and opposition parties, along with experts, will come together regularly to devise practical policies and contribute to the advancement of Korea’s science and technology.”
<Poster of National Strategic Technology Forum>
This forum series aims to explore policy and institutional solutions to help Korea gain technological leadership in a global context where strategic technologies—such as AI, semiconductors, biotechnology, and energy—directly influence national security and economic sovereignty. Lawmakers from both the Science, ICT, Broadcasting, and Communications Committee and the Trade, Industry, Energy, SMEs, and Startups Committee will continue to participate, fostering bipartisan dialogue. The forums are coordinated by the KAIST Policy Research Institute for National Strategic Technologies.
2025.07.31 View 217 -
 Is 24-hour health monitoring possible with ambient light energy?
<(From left) Ph.D candidate Youngmin Sim, Ph.D candidate Do Yun Park, Dr. Chanho Park, Professor Kyeongha Kwon>
Miniaturization and weight reduction of medical wearable devices for continuous health monitoring such as heart rate, blood oxygen saturation, and sweat component analysis remain major challenges. In particular, optical sensors consume a significant amount of power for LED operation and wireless transmission, requiring heavy and bulky batteries. To overcome these limitations, KAIST researchers have developed a next-generation wearable platform that enables 24-hour continuous measurement by using ambient light as an energy source and optimizing power management according to the power environment.
KAIST (President Kwang Hyung Lee) announced on the 30th that Professor Kyeongha Kwon's team from the School of Electrical Engineering, in collaboration with Dr. Chanho Park’s team at Northwestern University in the U.S., has developed an adaptive wireless wearable platform that reduces battery load by utilizing ambient light.
To address the battery issue of medical wearable devices, Professor Kyeongha Kwon’s research team developed an innovative platform that utilizes ambient natural light as an energy source. This platform integrates three complementary light energy technologies.
<Figure1.The wireless wearable platform minimizes the energy required for light sources through i) Photometric system that directly utilizes ambient light passing through windows for measurements, ii) Photovoltaic system that receives power from high-efficiency photovoltaic cells and wireless power receiver coils, and iii) Photoluminescent system that stores light using photoluminescent materials and emits light in dark conditions to support the two aforementioned systems. In-sensor computing minimizes power consumption by wirelessly transmitting only essential data. The adaptive power management system efficiently manages power by automatically selecting the optimal mode among 11 different power modes through a power selector based on the power supply level from the photovoltaic system and battery charge status.>
The first core technology, the Photometric Method, is a technique that adaptively adjusts LED brightness depending on the intensity of the ambient light source. By combining ambient natural light with LED light to maintain a constant total illumination level, it automatically dims the LED when natural light is strong and brightens it when natural light is weak.
Whereas conventional sensors had to keep the LED on at a fixed brightness regardless of the environment, this technology optimizes LED power in real time according to the surrounding environment. Experimental results showed that it reduced power consumption by as much as 86.22% under sufficient lighting conditions.
The second is the Photovoltaic Method using high-efficiency multijunction solar cells. This goes beyond simple solar power generation to convert light in both indoor and outdoor environments into electricity. In particular, the adaptive power management system automatically switches among 11 different power configurations based on ambient conditions and battery status to achieve optimal energy efficiency.
The third innovative technology is the Photoluminescent Method. By mixing strontium aluminate microparticles* into the sensor’s silicone encapsulation structure, light from the surroundings is absorbed and stored during the day and slowly released in the dark. As a result, after being exposed to 500W/m² of sunlight for 10 minutes, continuous measurement is possible for 2.5 minutes even in complete darkness.
*Strontium aluminate microparticles: A photoluminescent material used in glow-in-the-dark paint or safety signs, which absorbs light and emits it in the dark for an extended time.
These three technologies work complementarily—during bright conditions, the first and second methods are active, and in dark conditions, the third method provides additional support—enabling 24-hour continuous operation.
The research team applied this platform to various medical sensors to verify its practicality. The photoplethysmography sensor monitors heart rate and blood oxygen saturation in real time, allowing early detection of cardiovascular diseases. The blue light dosimeter accurately measures blue light, which causes skin aging and damage, and provides personalized skin protection guidance. The sweat analysis sensor uses microfluidic technology to simultaneously analyze salt, glucose, and pH in sweat, enabling real-time detection of dehydration and electrolyte imbalances.
Additionally, introducing in-sensor data computing significantly reduced wireless communication power consumption. Previously, all raw data had to be transmitted externally, but now only the necessary results are calculated and transmitted within the sensor, reducing data transmission requirements from 400B/s to 4B/s—a 100-fold decrease.
To validate performance, the research tested the device on healthy adult subjects in four different environments: bright indoor lighting, dim lighting, infrared lighting, and complete darkness. The results showed measurement accuracy equivalent to that of commercial medical devices in all conditions A mouse model experiment confirmed accurate blood oxygen saturation measurement in hypoxic conditions.
<Frigure2.The multimodal device applying the energy harvesting and power management platform consists of i) photoplethysmography (PPG) sensor, ii) blue light dosimeter, iii) photoluminescent microfluidic channel for sweat analysis and biomarker sensors (chloride ion, glucose, and pH), and iv) temperature sensor. This device was implemented with flexible printed circuit board (fPCB) to enable attachment to the skin. A silicon substrate with a window that allows ambient light and measurement light to pass through, along with photoluminescent encapsulation layer, encapsulates the PPG, blue light dosimeter, and temperature sensors, while the photoluminescent microfluidic channel is attached below the photoluminescent encapsulation layer to collect sweat>
Professor Kyeongha Kwon of KAIST, who led the research, stated, “This technology will enable 24-hour continuous health monitoring, shifting the medical paradigm from treatment-centered to prevention-centered shifting the medical paradigm from treatment-centered to prevention-centered,” further stating that “cost savings through early diagnosis as well as strengthened technological competitiveness in the next-generation wearable healthcare market are anticipated.”
This research was published on July 1 in the international journal Nature Communications, with Do Yun Park, a doctoral student in the AI Semiconductor Graduate Program, as co–first author.
※ Paper title: Adaptive Electronics for Photovoltaic, Photoluminescent and Photometric Methods in Power Harvesting for Wireless and Wearable Sensors ※ DOI: https://doi.org/10.1038/s41467-025-60911-1 ※ URL: https://www.nature.com/articles/s41467-025-60911-1
This research was supported by the National Research Foundation of Korea (Outstanding Young Researcher Program and Regional Innovation Leading Research Center Project), the Ministry of Science and ICT and Institute of Information & Communications Technology Planning & Evaluation (IITP) AI Semiconductor Graduate Program, and the BK FOUR Program (Connected AI Education & Research Program for Industry and Society Innovation, KAIST EE).
2025.07.30 View 477
Is 24-hour health monitoring possible with ambient light energy?
<(From left) Ph.D candidate Youngmin Sim, Ph.D candidate Do Yun Park, Dr. Chanho Park, Professor Kyeongha Kwon>
Miniaturization and weight reduction of medical wearable devices for continuous health monitoring such as heart rate, blood oxygen saturation, and sweat component analysis remain major challenges. In particular, optical sensors consume a significant amount of power for LED operation and wireless transmission, requiring heavy and bulky batteries. To overcome these limitations, KAIST researchers have developed a next-generation wearable platform that enables 24-hour continuous measurement by using ambient light as an energy source and optimizing power management according to the power environment.
KAIST (President Kwang Hyung Lee) announced on the 30th that Professor Kyeongha Kwon's team from the School of Electrical Engineering, in collaboration with Dr. Chanho Park’s team at Northwestern University in the U.S., has developed an adaptive wireless wearable platform that reduces battery load by utilizing ambient light.
To address the battery issue of medical wearable devices, Professor Kyeongha Kwon’s research team developed an innovative platform that utilizes ambient natural light as an energy source. This platform integrates three complementary light energy technologies.
<Figure1.The wireless wearable platform minimizes the energy required for light sources through i) Photometric system that directly utilizes ambient light passing through windows for measurements, ii) Photovoltaic system that receives power from high-efficiency photovoltaic cells and wireless power receiver coils, and iii) Photoluminescent system that stores light using photoluminescent materials and emits light in dark conditions to support the two aforementioned systems. In-sensor computing minimizes power consumption by wirelessly transmitting only essential data. The adaptive power management system efficiently manages power by automatically selecting the optimal mode among 11 different power modes through a power selector based on the power supply level from the photovoltaic system and battery charge status.>
The first core technology, the Photometric Method, is a technique that adaptively adjusts LED brightness depending on the intensity of the ambient light source. By combining ambient natural light with LED light to maintain a constant total illumination level, it automatically dims the LED when natural light is strong and brightens it when natural light is weak.
Whereas conventional sensors had to keep the LED on at a fixed brightness regardless of the environment, this technology optimizes LED power in real time according to the surrounding environment. Experimental results showed that it reduced power consumption by as much as 86.22% under sufficient lighting conditions.
The second is the Photovoltaic Method using high-efficiency multijunction solar cells. This goes beyond simple solar power generation to convert light in both indoor and outdoor environments into electricity. In particular, the adaptive power management system automatically switches among 11 different power configurations based on ambient conditions and battery status to achieve optimal energy efficiency.
The third innovative technology is the Photoluminescent Method. By mixing strontium aluminate microparticles* into the sensor’s silicone encapsulation structure, light from the surroundings is absorbed and stored during the day and slowly released in the dark. As a result, after being exposed to 500W/m² of sunlight for 10 minutes, continuous measurement is possible for 2.5 minutes even in complete darkness.
*Strontium aluminate microparticles: A photoluminescent material used in glow-in-the-dark paint or safety signs, which absorbs light and emits it in the dark for an extended time.
These three technologies work complementarily—during bright conditions, the first and second methods are active, and in dark conditions, the third method provides additional support—enabling 24-hour continuous operation.
The research team applied this platform to various medical sensors to verify its practicality. The photoplethysmography sensor monitors heart rate and blood oxygen saturation in real time, allowing early detection of cardiovascular diseases. The blue light dosimeter accurately measures blue light, which causes skin aging and damage, and provides personalized skin protection guidance. The sweat analysis sensor uses microfluidic technology to simultaneously analyze salt, glucose, and pH in sweat, enabling real-time detection of dehydration and electrolyte imbalances.
Additionally, introducing in-sensor data computing significantly reduced wireless communication power consumption. Previously, all raw data had to be transmitted externally, but now only the necessary results are calculated and transmitted within the sensor, reducing data transmission requirements from 400B/s to 4B/s—a 100-fold decrease.
To validate performance, the research tested the device on healthy adult subjects in four different environments: bright indoor lighting, dim lighting, infrared lighting, and complete darkness. The results showed measurement accuracy equivalent to that of commercial medical devices in all conditions A mouse model experiment confirmed accurate blood oxygen saturation measurement in hypoxic conditions.
<Frigure2.The multimodal device applying the energy harvesting and power management platform consists of i) photoplethysmography (PPG) sensor, ii) blue light dosimeter, iii) photoluminescent microfluidic channel for sweat analysis and biomarker sensors (chloride ion, glucose, and pH), and iv) temperature sensor. This device was implemented with flexible printed circuit board (fPCB) to enable attachment to the skin. A silicon substrate with a window that allows ambient light and measurement light to pass through, along with photoluminescent encapsulation layer, encapsulates the PPG, blue light dosimeter, and temperature sensors, while the photoluminescent microfluidic channel is attached below the photoluminescent encapsulation layer to collect sweat>
Professor Kyeongha Kwon of KAIST, who led the research, stated, “This technology will enable 24-hour continuous health monitoring, shifting the medical paradigm from treatment-centered to prevention-centered shifting the medical paradigm from treatment-centered to prevention-centered,” further stating that “cost savings through early diagnosis as well as strengthened technological competitiveness in the next-generation wearable healthcare market are anticipated.”
This research was published on July 1 in the international journal Nature Communications, with Do Yun Park, a doctoral student in the AI Semiconductor Graduate Program, as co–first author.
※ Paper title: Adaptive Electronics for Photovoltaic, Photoluminescent and Photometric Methods in Power Harvesting for Wireless and Wearable Sensors ※ DOI: https://doi.org/10.1038/s41467-025-60911-1 ※ URL: https://www.nature.com/articles/s41467-025-60911-1
This research was supported by the National Research Foundation of Korea (Outstanding Young Researcher Program and Regional Innovation Leading Research Center Project), the Ministry of Science and ICT and Institute of Information & Communications Technology Planning & Evaluation (IITP) AI Semiconductor Graduate Program, and the BK FOUR Program (Connected AI Education & Research Program for Industry and Society Innovation, KAIST EE).
2025.07.30 View 477