Department+of+Civil+and+Environmental+Engineering
-
 Participation in the 2018 Bio-Digital City Workshop in Paris
(A student make a presentatiion during the Bio-Digital City Workshop in Paris last month.)
KAIST students explored ideas for developing future cities during the 2018 Bio-Digital City Workshop held in Paris last month.
This international workshop hosted by Cité des Sciences et de l'Industrie was held under the theme “Biomimicry, Digital City and Big Data.” During the workshop from July 10 to July 20, students teamed up with French counterparts to develop innovative urban design ideas. Cité des Sciences et de l'Industrie is the largest science museum in Europe and is operated by Universcience, a specialized institute of science and technology in France.
Professor Seongju Chang from the Department of Civil and Environmental Engineering and Professor Jihyun Lee of the Graduate School of Culture Technology Students led the students group.
Participants presented their ideas and findings on new urban solutions that combine biomimetic systems and digital technology. Each student group analyzed a special natural ecosystem such as sand dunes, jellyfish communities, or mangrove forests and conducted research to extract algorithms for constructing sustainable urban building complexes based on the results. The extracted algorithm was used to conceive a sustainable building complex forming a part of the urban environment by applying it to the actual Parisian city segment given as the virtual site for the workshop.
Students from diverse background in both countries participated in this convergence workshop. KAIST students included Ph.D. candidate Hyung Min Cho, undergraduates Min-Woo Jeong, Seung-Hwan Cha, and Sang-Jun Park from the Department of Civil and Environmental Engineering, undergraduate Kyeong-Keun Seo from the Department of Materials Science and Engineering, JiWhan Jeong (Master’s course) from the Department of Industrial and Systems Engineering, Ph.D. candidate Bo-Yoon Zang from the Graduate School of Culture Technology. They teamed up with French students from diverse backgrounds, including Design/Science, Visual Design, Geography, Computer Science and Humanities and Social Science.
This workshop will serve as another opportunity to expand academic and human exchange efforts in the domain of smart and sustainable cities with Europe in the future as the first international cooperation activity of KAIST and the Paris La Villette Science Museum.
Professor Seong-Ju Chang who led the research group said, "We will continue to establish a cooperative relationship between KAIST and the European scientific community. This workshop is a good opportunity to demonstrate the competence of KAIST students and their scientific and technological excellence on the international stage.”
2018.08.01 View 9021
Participation in the 2018 Bio-Digital City Workshop in Paris
(A student make a presentatiion during the Bio-Digital City Workshop in Paris last month.)
KAIST students explored ideas for developing future cities during the 2018 Bio-Digital City Workshop held in Paris last month.
This international workshop hosted by Cité des Sciences et de l'Industrie was held under the theme “Biomimicry, Digital City and Big Data.” During the workshop from July 10 to July 20, students teamed up with French counterparts to develop innovative urban design ideas. Cité des Sciences et de l'Industrie is the largest science museum in Europe and is operated by Universcience, a specialized institute of science and technology in France.
Professor Seongju Chang from the Department of Civil and Environmental Engineering and Professor Jihyun Lee of the Graduate School of Culture Technology Students led the students group.
Participants presented their ideas and findings on new urban solutions that combine biomimetic systems and digital technology. Each student group analyzed a special natural ecosystem such as sand dunes, jellyfish communities, or mangrove forests and conducted research to extract algorithms for constructing sustainable urban building complexes based on the results. The extracted algorithm was used to conceive a sustainable building complex forming a part of the urban environment by applying it to the actual Parisian city segment given as the virtual site for the workshop.
Students from diverse background in both countries participated in this convergence workshop. KAIST students included Ph.D. candidate Hyung Min Cho, undergraduates Min-Woo Jeong, Seung-Hwan Cha, and Sang-Jun Park from the Department of Civil and Environmental Engineering, undergraduate Kyeong-Keun Seo from the Department of Materials Science and Engineering, JiWhan Jeong (Master’s course) from the Department of Industrial and Systems Engineering, Ph.D. candidate Bo-Yoon Zang from the Graduate School of Culture Technology. They teamed up with French students from diverse backgrounds, including Design/Science, Visual Design, Geography, Computer Science and Humanities and Social Science.
This workshop will serve as another opportunity to expand academic and human exchange efforts in the domain of smart and sustainable cities with Europe in the future as the first international cooperation activity of KAIST and the Paris La Villette Science Museum.
Professor Seong-Ju Chang who led the research group said, "We will continue to establish a cooperative relationship between KAIST and the European scientific community. This workshop is a good opportunity to demonstrate the competence of KAIST students and their scientific and technological excellence on the international stage.”
2018.08.01 View 9021 -
 Formation of Burning Ice in Oceanic Clay Rich Sediment Disclosed
(from left: Professor Tae-Hyuk Kwon and PhD candidate Taehyung Park) A KAIST research team has identified the formation of natural gas hydrates, so-called flammable ice, formed in oceans.
Professor Tae-Hyuk Kwon from the Department of Civil & Environmental Engineering and his team found that clay minerals in oceanic clay-rich sedimentary deposits promote formation of gas hydrates and proposed the principle of gas hydrate formation in the clayey sedimentary layers.
Gas hydrates are ice-like crystalline structures composed of hydrogen-bonded water molecules encapsulating gas molecules. They are also known as burning ice. Their deposits are so huge that they gain attention for alternative energy.
Conventionally, it was believed that formation of gas hydrates is limited in clay sedimentary deposits; however, unexpected abundance of natural gas hydrates in oceanic clay-rich sedimentary deposits raised the issue of how they formed.
The surfaces of natural clay minerals are negatively charged and, thus, unavoidably generate physicochemical interactions between clay and water. Such clay-water interactions have a critical role in the occurrence of natural gas hydrates in clay-rich sedimentary formations.
However, there has been experimental difficulty in analyzing hydrate formation because of the cations contained in clay particles, which balance the clay surface charges. Therefore, clay particles inevitably release the cations when mixed with water, which complicates the interpretation of experimental results.
To overcome this limitation, the team polarized water molecules with an electric field and monitored the induction times of water molecules forming gas hydrates.
They found that the 10 kV/m of electric field promoted gas hydrate nucleation under certain conditions rather than slowing it down, due to the partial breakage of the hydrogen bonded water clusters and the lowered thermal energy of water molecules.
Professor Kwon said, “Through this research, we gained better insight into the origin of gas hydrates occurrence in clay-rich sedimentary deposits. In the near future, we will soon be able to commercially produce methane gas from natural gas hydrate deposits.”
This research, led by PhD candidate Taehyung Park, was published online in Environmental Science and Technology on February 3. (doi: 10.1021/acs.est.7b05477)
Figure 1. Formation of gas hydrates with water molecules
Figure 2. Enhancement and inhibition of gas hydrates
2018.04.09 View 5938
Formation of Burning Ice in Oceanic Clay Rich Sediment Disclosed
(from left: Professor Tae-Hyuk Kwon and PhD candidate Taehyung Park) A KAIST research team has identified the formation of natural gas hydrates, so-called flammable ice, formed in oceans.
Professor Tae-Hyuk Kwon from the Department of Civil & Environmental Engineering and his team found that clay minerals in oceanic clay-rich sedimentary deposits promote formation of gas hydrates and proposed the principle of gas hydrate formation in the clayey sedimentary layers.
Gas hydrates are ice-like crystalline structures composed of hydrogen-bonded water molecules encapsulating gas molecules. They are also known as burning ice. Their deposits are so huge that they gain attention for alternative energy.
Conventionally, it was believed that formation of gas hydrates is limited in clay sedimentary deposits; however, unexpected abundance of natural gas hydrates in oceanic clay-rich sedimentary deposits raised the issue of how they formed.
The surfaces of natural clay minerals are negatively charged and, thus, unavoidably generate physicochemical interactions between clay and water. Such clay-water interactions have a critical role in the occurrence of natural gas hydrates in clay-rich sedimentary formations.
However, there has been experimental difficulty in analyzing hydrate formation because of the cations contained in clay particles, which balance the clay surface charges. Therefore, clay particles inevitably release the cations when mixed with water, which complicates the interpretation of experimental results.
To overcome this limitation, the team polarized water molecules with an electric field and monitored the induction times of water molecules forming gas hydrates.
They found that the 10 kV/m of electric field promoted gas hydrate nucleation under certain conditions rather than slowing it down, due to the partial breakage of the hydrogen bonded water clusters and the lowered thermal energy of water molecules.
Professor Kwon said, “Through this research, we gained better insight into the origin of gas hydrates occurrence in clay-rich sedimentary deposits. In the near future, we will soon be able to commercially produce methane gas from natural gas hydrate deposits.”
This research, led by PhD candidate Taehyung Park, was published online in Environmental Science and Technology on February 3. (doi: 10.1021/acs.est.7b05477)
Figure 1. Formation of gas hydrates with water molecules
Figure 2. Enhancement and inhibition of gas hydrates
2018.04.09 View 5938 -
 Research Center for Smart Submerged Floating Tunnel Systems Opens
(Distinguished guests including President Shin (fourth from the right) and Director Lee (third from left) at the opening ceremony)
The Research Center for a Smart Submerged Floating Tunnel Systems was recently established at KAIST with the purpose of taking the lead in developing fundamental and applicable technology for submerged floating tunnels as well as fostering creative and talented people. Haeng-Ki Lee, a professor in the Department of Civil & Environmental Engineering at KAIST is heading the center.
KAIST held its opening ceremony on September 7, 2017 in the Applied Engineering Building located on the main campus.
Distinguished guests, including KAIST president Sung-Chul Shin, the President of the Korea Institute of Ocean Science and Technology Gi-Hoon Hong, the President of the Korean Society of Civil Engineering Young-Seok Park, and the Director in the Division of Engineering at the National Research Foundation of Korea Joong-Kon Park attended the ceremony.
The National Research Foundation of Korea provides Engineering Research Center (ERC) projects which find and foster groups with outstanding research performance in a field of engineering. The projects support these groups so that they can strengthen their global competitiveness while enhancing national competence in basic research.
The ‘Research Center for Smart Submerged Floating Tunnel Systems’ was selected as one of the ERC projects in 2017. For the next seven years, the research center will work to develop a submerged floating tunnel system resistant depths greater than 100 meters.
To achieve its goal, the center has defined crucial research topics including: i) a structural analysis program and integrated design technology specific for submerged floating tunnel systems, ii) high-durability marine construction materials and submerged construction integrated systems, and iii) safety and maintenance integrated technology for smart submerged floating tunnel systems.
The ‘Research Center for Smart Submerged Floating Tunnel Systems’ will devote itself to developing a variety of fundamental and applicable technology that will be leading global maritime construction. Moreover, it will concentrate on fostering professional research manpower in related areas.
The Director of the Center Lee said, “The center will cooperate with KAIST researchers who are experts in various fields, including structures, materials, construction, and maritime research. Based on this collaboration, the center will contribute to achieving autonomous technologies by developing fundamental and applicable technology related with submerged floating tunnel systems. It will also take the role of a leading global research hub in the field of submerged floating tunnels as well as construction technologies.”
2017.09.07 View 7812
Research Center for Smart Submerged Floating Tunnel Systems Opens
(Distinguished guests including President Shin (fourth from the right) and Director Lee (third from left) at the opening ceremony)
The Research Center for a Smart Submerged Floating Tunnel Systems was recently established at KAIST with the purpose of taking the lead in developing fundamental and applicable technology for submerged floating tunnels as well as fostering creative and talented people. Haeng-Ki Lee, a professor in the Department of Civil & Environmental Engineering at KAIST is heading the center.
KAIST held its opening ceremony on September 7, 2017 in the Applied Engineering Building located on the main campus.
Distinguished guests, including KAIST president Sung-Chul Shin, the President of the Korea Institute of Ocean Science and Technology Gi-Hoon Hong, the President of the Korean Society of Civil Engineering Young-Seok Park, and the Director in the Division of Engineering at the National Research Foundation of Korea Joong-Kon Park attended the ceremony.
The National Research Foundation of Korea provides Engineering Research Center (ERC) projects which find and foster groups with outstanding research performance in a field of engineering. The projects support these groups so that they can strengthen their global competitiveness while enhancing national competence in basic research.
The ‘Research Center for Smart Submerged Floating Tunnel Systems’ was selected as one of the ERC projects in 2017. For the next seven years, the research center will work to develop a submerged floating tunnel system resistant depths greater than 100 meters.
To achieve its goal, the center has defined crucial research topics including: i) a structural analysis program and integrated design technology specific for submerged floating tunnel systems, ii) high-durability marine construction materials and submerged construction integrated systems, and iii) safety and maintenance integrated technology for smart submerged floating tunnel systems.
The ‘Research Center for Smart Submerged Floating Tunnel Systems’ will devote itself to developing a variety of fundamental and applicable technology that will be leading global maritime construction. Moreover, it will concentrate on fostering professional research manpower in related areas.
The Director of the Center Lee said, “The center will cooperate with KAIST researchers who are experts in various fields, including structures, materials, construction, and maritime research. Based on this collaboration, the center will contribute to achieving autonomous technologies by developing fundamental and applicable technology related with submerged floating tunnel systems. It will also take the role of a leading global research hub in the field of submerged floating tunnels as well as construction technologies.”
2017.09.07 View 7812 -
 A Firefighter Drone That Flies and Crawls Up Walls
KAIST researchers developed a wall-climbing scout drone to fight fires in high-rises, finding the source of the fires and locating people trapped inside.
The 1974 American disaster film Towering Inferno depicted well the earnest struggles of firefighters engaged in ending a fire at a 138-story skyscraper. To this day, fires at high-rise buildings are considered one of the most dangerous disasters.
Skyscraper fires are particularly difficult to contain because of their ability to spread rapidly in high-occupant density spaces and the challenge of fighting fires in the buildings’ complex vertical structure. Accessibility to skyscrapers at the time of the fire is limited, and it is hard to assess the initial situation.
A research team at KAIST led by Professor Hyun Myung of the Civil and Environmental Engineering Department developed an unmanned aerial vehicle, named the Fireproof Aerial RObot System (FAROS), which detects fires in skyscrapers, searches the inside of the building, and transfers data in real time from fire scenes to the ground station.
As an extended version of Climbing Aerial RObot System (CAROS) that was created in 2014 by the research team, the FAROS can also fly and climb walls.
The FAROS, whose movements rely on a quadrotor system, can freely change its flight mode into a spider’s crawling on walls, and vice versa, facilitating unimpeded navigation in the labyrinth of narrow spaces filled with debris and rubble inside the blazing building.
The drone “estimates” its pose by utilizing a 2-D laser scanner, an altimeter, and an Inertia Measurement Unit sensor to navigate autonomously. With the localization result and using a thermal-imaging camera to recognize objects or people inside a building, the FAROS can also detect and find the fire-ignition point by employing dedicated image-processing technology.
The FAROS is fireproof and flame-retardant. The drone’s body is covered with aramid fibers to protect its electric and mechanical components from the direct effects of the flame. The aramid fiber skin also has a buffer of air underneath it, and a thermoelectric cooling system based on the Peltier effect to help maintain the air layer within a specific temperature range.
The research team demonstrated the feasibility of the localization system and wall-climbing mechanism in a smoky indoor environment. The fireproof test showed that the drone could endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
Professor Myung said, “As cities become more crowded with skyscrapers and super structures, fire incidents in these high-rise buildings are life-threatening massive disasters. The FAROS can be aptly deployed to the disaster site at an early stage of such incidents to minimize the damage and maximize the safety and efficiency of rescue mission.”
The research team has recently started to enhance the performance of the fireproof design for the exteroceptive sensors including a 2-D laser scanner and a thermal-imaging camera because those sensors could be more exposed to fire than other inside sensors and electric components.
This research was funded by the KAIST Initiative for Disaster Studies and the KAIST Institute.
YouTube link: https://youtu.be/gPNRZi0EPQw
Picture 1: Demonstration of Wall-climbing
The Fireproof Aerial RObot System (FAROS) is a wall-climbing scout drone developed to conduct explorations into the site of skyscraper fires. It has an ability to climb walls in smoky, narrow spaces inside buildings.
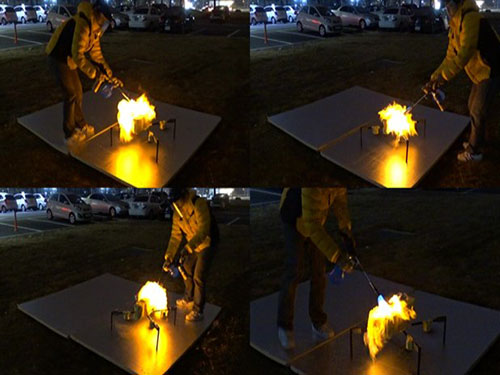
Figure 2: An Ability to Withstand Fires
The FAROS can endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
2016.01.20 View 14676
A Firefighter Drone That Flies and Crawls Up Walls
KAIST researchers developed a wall-climbing scout drone to fight fires in high-rises, finding the source of the fires and locating people trapped inside.
The 1974 American disaster film Towering Inferno depicted well the earnest struggles of firefighters engaged in ending a fire at a 138-story skyscraper. To this day, fires at high-rise buildings are considered one of the most dangerous disasters.
Skyscraper fires are particularly difficult to contain because of their ability to spread rapidly in high-occupant density spaces and the challenge of fighting fires in the buildings’ complex vertical structure. Accessibility to skyscrapers at the time of the fire is limited, and it is hard to assess the initial situation.
A research team at KAIST led by Professor Hyun Myung of the Civil and Environmental Engineering Department developed an unmanned aerial vehicle, named the Fireproof Aerial RObot System (FAROS), which detects fires in skyscrapers, searches the inside of the building, and transfers data in real time from fire scenes to the ground station.
As an extended version of Climbing Aerial RObot System (CAROS) that was created in 2014 by the research team, the FAROS can also fly and climb walls.
The FAROS, whose movements rely on a quadrotor system, can freely change its flight mode into a spider’s crawling on walls, and vice versa, facilitating unimpeded navigation in the labyrinth of narrow spaces filled with debris and rubble inside the blazing building.
The drone “estimates” its pose by utilizing a 2-D laser scanner, an altimeter, and an Inertia Measurement Unit sensor to navigate autonomously. With the localization result and using a thermal-imaging camera to recognize objects or people inside a building, the FAROS can also detect and find the fire-ignition point by employing dedicated image-processing technology.
The FAROS is fireproof and flame-retardant. The drone’s body is covered with aramid fibers to protect its electric and mechanical components from the direct effects of the flame. The aramid fiber skin also has a buffer of air underneath it, and a thermoelectric cooling system based on the Peltier effect to help maintain the air layer within a specific temperature range.
The research team demonstrated the feasibility of the localization system and wall-climbing mechanism in a smoky indoor environment. The fireproof test showed that the drone could endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
Professor Myung said, “As cities become more crowded with skyscrapers and super structures, fire incidents in these high-rise buildings are life-threatening massive disasters. The FAROS can be aptly deployed to the disaster site at an early stage of such incidents to minimize the damage and maximize the safety and efficiency of rescue mission.”
The research team has recently started to enhance the performance of the fireproof design for the exteroceptive sensors including a 2-D laser scanner and a thermal-imaging camera because those sensors could be more exposed to fire than other inside sensors and electric components.
This research was funded by the KAIST Initiative for Disaster Studies and the KAIST Institute.
YouTube link: https://youtu.be/gPNRZi0EPQw
Picture 1: Demonstration of Wall-climbing
The Fireproof Aerial RObot System (FAROS) is a wall-climbing scout drone developed to conduct explorations into the site of skyscraper fires. It has an ability to climb walls in smoky, narrow spaces inside buildings.
Figure 2: An Ability to Withstand Fires
The FAROS can endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
2016.01.20 View 14676 -
 Jellyfish Exterminator Robot Developed
Formation Control demonstrated by JEROS
- Trial performance successfully completed with three assembly robots -
A team led by KAIST Civil and Environmental Engineering Department’s Professor Hyeon Myeong has just finished testing the cooperative assembly robot for jellyfish population control, named JEROS, in the field.
The rising number of accidents and financial losses by fishing industry, estimated at 300 billion won per year, caused by the recent swarm of jellyfish in coastal waters has been a major problem for many years. The research team led by Prof. Hyeon Myeong began developing an unmanned automated system capable of eradicating jellyfishin in 2009, and has since completed field-tests last year with success.
This year, JEROS’s performance and speed has been improved with the ability to work in formation as a cooperative group to efficiently exterminate jellyfish.
An unmanned aquatic robot JEROS with a mountable grinding part is buoyed by two cylindrical bodies that utilizes propulsion motors to move forward and reverse, as well as rotate 360 degrees. Furthermore, GIS (geographic information system)-based map data is used to specify the region for jellyfish extermination, which automatically calculates the path for the task. JEROS then navigates autonomously using a GPS (Global Positioning System) receiver and an INS(inertial navigation system).
The assembly robots maintain a set formation pattern, while calculating its course to perform jellyfish extermination. The advantage of this method is that there is no need for individual control of the robots. Only the leader robot requires the calculated path, and the other robots can simply follow in a formation by exchanging their location information via wireless communication (ZigBee method).
JEROS uses its propulsion speed to capture jellyfish into the grinding part on the bottom, which then suctions the jellyfish toward the propeller to be exterminated.
The field test results show that three assembly robots operating at 4 knots (7.2km/h) disposes jellyfish at the rate of about 900kg/h.
The research team has currently completed testing JEROS at Gyeongnam Masan Bay and is expected to further experiment and improve the performance at various environment and conditions.
JEROS may also be utilized for other purposes including marine patrols, prevention of oil spills and waste removal in the sea.
JEROS research has been funded by Ministry of Science, ICT and Future Planning and Ministry of Trade, Industry and Energy.
2013.09.27 View 16165
Jellyfish Exterminator Robot Developed
Formation Control demonstrated by JEROS
- Trial performance successfully completed with three assembly robots -
A team led by KAIST Civil and Environmental Engineering Department’s Professor Hyeon Myeong has just finished testing the cooperative assembly robot for jellyfish population control, named JEROS, in the field.
The rising number of accidents and financial losses by fishing industry, estimated at 300 billion won per year, caused by the recent swarm of jellyfish in coastal waters has been a major problem for many years. The research team led by Prof. Hyeon Myeong began developing an unmanned automated system capable of eradicating jellyfishin in 2009, and has since completed field-tests last year with success.
This year, JEROS’s performance and speed has been improved with the ability to work in formation as a cooperative group to efficiently exterminate jellyfish.
An unmanned aquatic robot JEROS with a mountable grinding part is buoyed by two cylindrical bodies that utilizes propulsion motors to move forward and reverse, as well as rotate 360 degrees. Furthermore, GIS (geographic information system)-based map data is used to specify the region for jellyfish extermination, which automatically calculates the path for the task. JEROS then navigates autonomously using a GPS (Global Positioning System) receiver and an INS(inertial navigation system).
The assembly robots maintain a set formation pattern, while calculating its course to perform jellyfish extermination. The advantage of this method is that there is no need for individual control of the robots. Only the leader robot requires the calculated path, and the other robots can simply follow in a formation by exchanging their location information via wireless communication (ZigBee method).
JEROS uses its propulsion speed to capture jellyfish into the grinding part on the bottom, which then suctions the jellyfish toward the propeller to be exterminated.
The field test results show that three assembly robots operating at 4 knots (7.2km/h) disposes jellyfish at the rate of about 900kg/h.
The research team has currently completed testing JEROS at Gyeongnam Masan Bay and is expected to further experiment and improve the performance at various environment and conditions.
JEROS may also be utilized for other purposes including marine patrols, prevention of oil spills and waste removal in the sea.
JEROS research has been funded by Ministry of Science, ICT and Future Planning and Ministry of Trade, Industry and Energy.
2013.09.27 View 16165 -
 Jellyfish removal robot developed
Professor Myung Hyun’s research team from the Department of Civil and Environmental Engineering at KAIST has developed a jellyfish removal robot named ‘JEROS’ (JEROS: Jellyfish Elimination RObotic Swarm).
With jellyfish attacks around the south-west coast of Korea becoming a serious problem, causing deaths and operational losses (around 3 billion won a year), Professor Myung’s team started the development of this unmanned automatic jellyfish removal system 3 years ago.
JEROS floats on the surface of the water using two long cylindrical bodies. Motors are attached to the bodies such that the robot can move back and forth as well as rotate on water. A camera and GPS system allows the JEROS to detect jellyfish swarm as well as plan and calculate its work path relative to its position.
The jellyfish are removed by a submerged net that sucks them up using the velocity created by the unmanned sailing. Once caught, the jellyfish are pulverized using a special propeller.
JEROS is estimated to be 3 times more economical than manual removal. Upon experimentation, it showed a removal rate of 400kg per hour at 6 knots. To reach similar effectiveness as manual net removal, which removes up to 1 ton per hour, the research team designed the robot such that 3 or more individual robots could be grouped together and controlled as one.
The research team has finished conducting removal tests in Gunsan and Masan and plan to commercialize the robot next April after improving the removal technology. JEROS technology can also be used for a wide range of purposes such as patrolling and guarding, preventing oil spills or removing floating waste. This research was funded by the Ministry of Education, Science and Technology since 2010.
2012.08.29 View 11155
Jellyfish removal robot developed
Professor Myung Hyun’s research team from the Department of Civil and Environmental Engineering at KAIST has developed a jellyfish removal robot named ‘JEROS’ (JEROS: Jellyfish Elimination RObotic Swarm).
With jellyfish attacks around the south-west coast of Korea becoming a serious problem, causing deaths and operational losses (around 3 billion won a year), Professor Myung’s team started the development of this unmanned automatic jellyfish removal system 3 years ago.
JEROS floats on the surface of the water using two long cylindrical bodies. Motors are attached to the bodies such that the robot can move back and forth as well as rotate on water. A camera and GPS system allows the JEROS to detect jellyfish swarm as well as plan and calculate its work path relative to its position.
The jellyfish are removed by a submerged net that sucks them up using the velocity created by the unmanned sailing. Once caught, the jellyfish are pulverized using a special propeller.
JEROS is estimated to be 3 times more economical than manual removal. Upon experimentation, it showed a removal rate of 400kg per hour at 6 knots. To reach similar effectiveness as manual net removal, which removes up to 1 ton per hour, the research team designed the robot such that 3 or more individual robots could be grouped together and controlled as one.
The research team has finished conducting removal tests in Gunsan and Masan and plan to commercialize the robot next April after improving the removal technology. JEROS technology can also be used for a wide range of purposes such as patrolling and guarding, preventing oil spills or removing floating waste. This research was funded by the Ministry of Education, Science and Technology since 2010.
2012.08.29 View 11155